В предыдущей части занятия мы познакомились с микросхемой MCP3201, подключили нашу схему, а также настроили проект. Если мы сейчас соберём и запустим наш проект, то мы на индикаторе ничего не увидим, так как индикатор у нас другой и подключен он…

В предыдущей части занятия мы познакомились с микросхемой MCP3201, подключили нашу схему, а также настроили проект. Если мы сейчас соберём и запустим наш проект, то мы на индикаторе ничего не увидим, так как индикатор у нас другой и подключен он…
Продолжаем изучение модуля MSSP, в частности его работу с шиной SPI. И сегодня мы уже поработаем с данной шиной на приём данных от устройства. Для этого мы возьмём микросхему MCP3201. Эта микросхема является внешним аналого-цифровым преобразователем. Разработчиком данной микросхемы является компания Microchip Technology.…

В предыдущей части занятия мы познакомились с микросхемой MAX7219, а также написали некоторые служебные функции для работы будущей библиотеки. Далее мы сначала посмотрим, как выглядит наш индикатор Мы видим, что вместо восьмиразрядного индикатора в модуле установлены два четырёхразрядных…
Вот и настало время нам испытать модуль MSSP в режиме SPI на практике. Так как мы привыкли делать всё последовательно, то сначала поставим себе задачу попроще: поработать с шиной SPI в режиме ведущего устройства только на передачу. Поэтому я и…
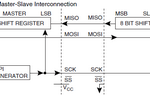
В предыдущей части урока мы познакомимся с шиной SPI и организацией работы с ней модуля MSSP, рассмотрев его основные два управляющих регистра. В режиме SPI для ножек, участвующем в нём, приняты следующие сокращения в отличие от общепринятых: SDI —…
Переходим к следующему модулю — MSSP. Модуль MSSP (Master Synchronous Serial Port) — синхронная последовательная шина, которая обеспечивает аппаратную поддержку шин SPI и I2C, соответственно, именно в таких режимах она и может работать. Правда данные режимы могут ещё делиться на…

Продолжаем работу с беспроводным приёмо-передатчиком NRF24L01. И сегодня мы также займёмся передачей информации, но информацию каждый из наших модулей мы научим и принимать и передавать. Думаю, что это будет актуальная тема, так как мы зачастую хотим не просто передать какую-то информацию…

В предыдущей части нашего занятия мы создали и написали проект для приёмника, а также проект для первого передатчика. Проект мы сделаем полностью из проекта первого передатчика NRF24_RX_00 и назовём его NRF24_RX_01 с целью наименьших временных затрат для написания исходного кода. Откроем проект…
Продолжаем работу с беспроводным приёмо-передатчиком NRF24L01. И сегодня та плата, которая у нас выступала в роли приёмника, будет выступать уже в роли передатчика. И задачу мы уже будем решать обратную. Передать с модуля, подключенного к данной плате пакеты, наоборот, на несколько приемников. Приемников…

В предыдущей части урока мы подготовили проекты для двух передатчиков, также в проект приёмника добавили возможность приёма пакетов от двух передатчиков и отображения их в разных строках дисплея и проверили наш код на практике. Теперь займёмся третьим передатчиком. Схема для…
