На данном уроке мы установим MajorDomo на Raspberry PI. Напомню, что MajorDoMo — это сервер с визуализацией в веб-интерфейсе для выполнения задач по мониторингу и управления устройствами умного дома (различные датчики, устройства освещения, механизмы управления различными устройствами и тд). В сети очень много…

Автор: Narod Stream
MajorDoMo. Работаем с MQTT
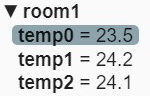
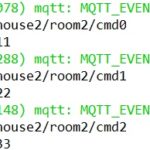
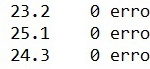
На данном уроке мы займёмся настройкой программного обеспечения для функционирования умного дома — MajorDoMo. И настроим мы данный продукт на контроль датчиков температуры, подключенных к контроллеру ESP32, который передаёт с них данные посредством протокола MQTT. Для этого нам потребуется собственно…
Устанавливаем MajorDoMo
На данном уроке мы попробуем установить на ПК программное обеспечение для функционирования умного дома — MajorDomo, которое представляет собой сервер с визуализацией в веб-интерфейсе для выполнения задач по мониторингу и управления устройствами умного дома (различные датчики, устройства освещения, механизмы управления…
ESP32 Урок 43. MQTT. Передаём температуру с датчика DS18B20
Продолжаем работу с протоколом MQTT. На данном уроке мы попробуем передать (опубликовать) с помощью данного протокола осознанные данные, а именно значение температуры, снятое с датчика DS18B20. С протоколом MQTT мы разобрались в прошлом уроке, а с датчиком DS18B20 мы также умеем…
ESP32 Урок 42. Wi-Fi. STA. MQTT Client
Продолжаем работу с протоколами модели OSI и на данном уроке мы попытаемся создать клиент MQTT. С протоколом MQTT (Message Queuing Telemetry Transport) мы знакомы из уроков по передаче данных этому и этому. Мы знаем, что клиент может быть одновременно и издателем…
MQTT. QoS. Уровни качества обслуживания. Практика
На прошлом уроке мы познакомились с протоколом передачи данных MQTT (Message Queuing Telemetry Transport). Также мы узнали, что у данного протокола существует три уровня качества обслуживания QoS (Quality of Service), с которыми я и предлагаю с помощью практического исследования передачи…
Raspberry PI. Урок 2. Устанавливаем MQTT брокер Mosquitto
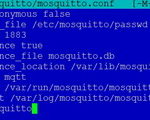
На предыдущем уроке мы установили операционную систему на плату Raspberry PI, тем самым сделав нашу плату работоспособной. А в этом уроке по протоколам передачи данных мы познакомились с протоколом MQTT (Message Queuing Telemetry Transport). Здесь же мы узнали, что для работы с данным…
Передача данных. MQTT. Знакомство с протоколом
Сегодня мы познакомимся с протоколом передачи данных MQTT. MQTT — это протокол обмена сообщениями по шаблону издатель/подписчик (publisher/subscriber). Аббревиатура наименования данного протокола расшифровывается как Message Queuing Telemetry Transport (MQTT). Если перевести дословно, то получится Транспорт телеметрии очереди сообщений. MQTT — это облегчённый…
Raspberry PI. Урок 1. Устанавливаем операционную систему

С данного урока начнём знакомство с такой платой как Raspberry PI. Эта плата представляет собой полноправный компьютер, который из-за его маленького размера называют микрокомпьютер. Думаю, что для вас давно уже не секрет, что это за компьютер, на какой системе он…
ESP32. Урок 41. RMT. DS18B20. Измеряем температуру
Продолжаем работать с модулем RMT и в прошлом занятии мы произвели инициализацию шины 1-Wire для работы с датчиком измерения температуры DS18B20. На данном уроке мы попробуем использовать наш датчик по назначению, то есть для измерения температуры. Лишний раз повторю, что с…
