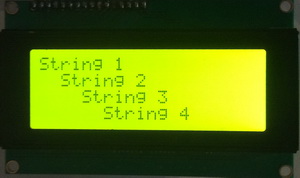
PIC Урок 10. LCD 20×4. 8-битный режим. Часть 2
В предыдущей части занятия мы познакомились с дисплеем, со схемой и её компонентами, а также создали и настроили проект. Перейдём в файл lcd.c и начнём потихоньку писать библиотеку, используя накопленный опыт программирования других типов контроллеров. Добавим макросы для ножек управления …
PIC Урок 10. LCD 20×4. 8-битный режим. Часть 2 Читать далее »