
AVR Урок 10. Таймеры-счетчики. Прерывания
Урок 10
Таймеры-счетчики. Прерывания
Сегодня мы узнаем, что такое таймеры-счётчики в микроконтроллерах и для чего они нужны, а также что такое прерывания и для чего они тоже нужны.
Таймеры-счётчики — это такие устройства или модули в микроконтроллере, которые, как видно из названия, постоянно что-то считают. Считают они либо до определённой величины, либо до такой величины, сколько они битности. Считают они постоянно с одной скоростью, со скоростью тактовой частоты микроконтроллера, поправленной на делители частоты, которые мы будем конфигурировать в определённых регистрах.
И вот эти таймеры-счётчики постоянно считают, если мы их инициализируем.
Таймеров в МК Atmega8 три.
![]()
Два из них — это восьмибитные таймеры, то есть такие, которые могут максимально досчитать только до 255. Данной величины нам будет маловато. Даже если мы применим максимальный делитель частоты, то мы не то что секунду не отсчитаем, мы даже полсекунды не сможем посчитать. А у нас задача именно такая, чтобы досчитывать до 1 секунды, чтобы управлять наращиванием счёта светодиодного индикатора. Можно конечно применить ещё наращивание переменной до определенной величины, но хотелось бы полностью аппаратного счёта.
Но есть ещё один таймер — это полноправный 16-битный таймер. Он не только 16-битный, но есть в нём ещё определённые прелести, которых нет у других таймеров. С данными опциями мы познакомимся позже.
Вот этот 16-битный таймер мы и будем сегодня изучать и использовать. Также, познакомившись с данным таймером, вам ничего не будет стоить самостоятельно изучить работу двух других, так как они значительно проще. Но тем не менее 8-битные таймеры в дальнейшем мы также будем рассматривать, так как для достижения более сложных задач нам одного таймера будет недостаточно.
Теперь коротко о прерываниях.
Прерывания (Interrupts) — это такие механизмы, которые прерывают код в зависимости от определённых условий или определённой обстановки, которые будут диктовать некоторые устройства, модули и шины, находящиеся в микроконтроллере.
В нашем контроллере Atmega8 существует 19 видов прерываний. Вот они все находятся в таблице в технической документации на контроллер
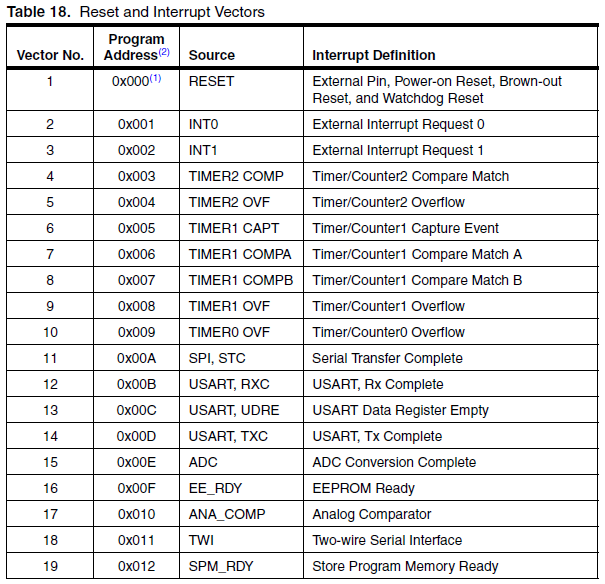
Какого типа могут быть условия? В нашем случае, например, досчитал таймер до определённой величины, либо например в какую-нибудь шину пришёл байт и другие условия.
На данный момент мы будем обрабатывать прерывание, которое находится в таблице, размещённой выше на 7 позиции — TIMER1 COMPA, вызываемое по адресу 0x006.
Теперь давайте рассмотрим наш 16-битный таймер или TIMER1.
Вот его структурная схема
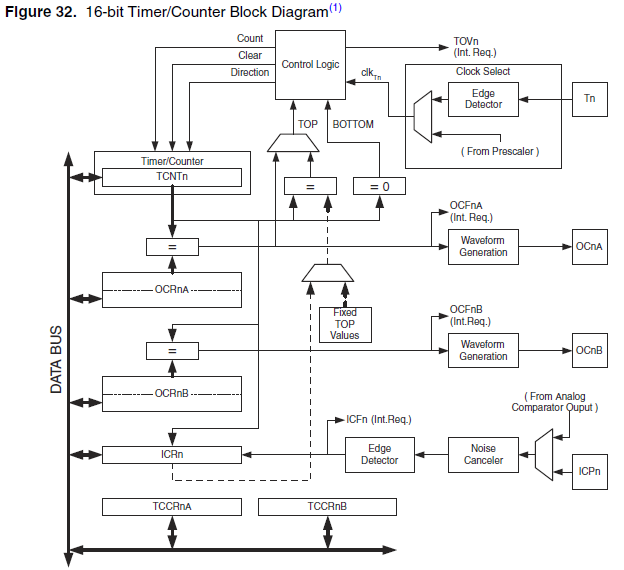
Мы видим там регистр TCNTn, в котором постоянно меняется число, то есть оно постоянно наращивается. Практически это и есть счётчик. То есть данный регистр и хранит число, до которого и досчитал таймер.
А в регистры OCRnA и OCRnB (буквы n — это номер таймера, в нашем случае будет 1) — это регистры, в которые мы заносим число, с которым будет сравниваться чило в регистре TCNTn.
Например, занесли мы какое-нибудь число в регистр OCRnA и как только данное число совпало со значением в регистре счёта, то возникнет прерывание и мы его сможем обработать. Таймеры с прерываниями очень похожи на обычную задержку в коде, только когда мы находимся в задержке, то мы в это время не можем выполнять никакой код (ну опять же образно «мы», на самом деле АЛУ). А когда считает таймер, то весь код нашей программы в это время спокойно выполняется. Так что мы выигрываем колоссально, не давая простаивать огромным ресурсам контроллера по секунде или даже по полсекунды. В это время мы можем обрабатывать нажатия кнопок, которые мы также можем обрабатывать в таймере и многое другое.
Есть также регистр TCCR. Данный регистр — это регистр управления. Там настраиваются определенные биты, отвечающие за конфигурацию таймера.
Также у таймера существует несколько режимов, с которыми мы также познакомимся немного позденее.
Он состоит из двух половинок, так как у нас конотроллер 8-битный и в нем не может быть 16-битных регистров. Поэтому в одной половинке регистра (а физически в одном регистре) хранится старшая часть регистра, а в другом — младшая. Можно также назвать это регистровой парой, состоящей из двух отдельных регистров TCCR1A и TCCR1B. Цифра 1 означает то, что регистр принадлежит именно таймеру 1.
Даный регист TCCR отвечает за установку делителя, чтобы таймер не так быстро считал, также он отвечает (вернее его определённые биты) за установку определённого режима.
За установку режима отвечают биты WGM
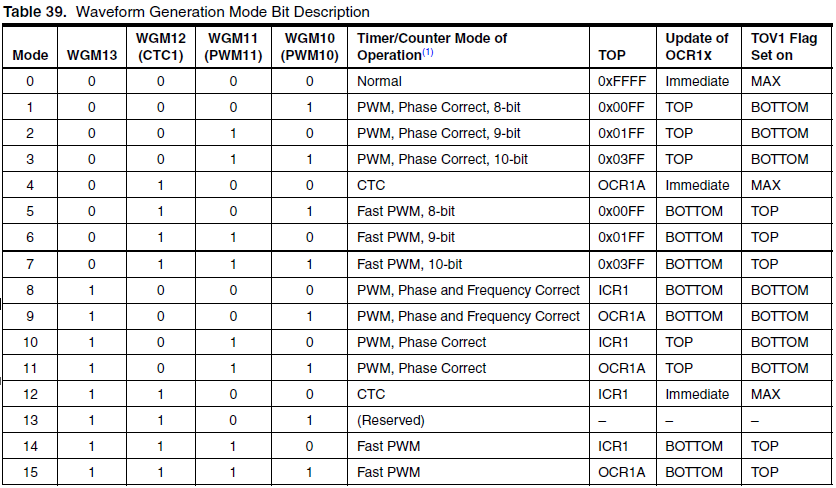
Мы видим здесь очень много разновидностей режимов.
Normal — это обычный режим, таймер считает до конца.
PWM — это ШИМ только разные разновидности, то есть таймер может играть роль широтно-импульсного модулятора. С данной технологией мы будем знакомиться в более поздних занятиях.
CTC — это сброс по совпадению, как раз то что нам будет нужно. Здесь то и сравнивются регистры TCNT и OCR. Таких режима два, нам нужен первый, второй работает с другим регистром.
Все разновидности режимов мы в данном занятии изучать не будем. Когда нам эти режимы потребуются, тогда и разберёмся.
Ну давайте не будем томить себя документацией и наконец-то попробуем что-то в какие-нибудь регистры занести.
Код, как всегда, был создан из прошлого проекта. Для протеуса также код был скопирован и переименован с прошлого занятия, также в свойствах контроллера был указан путь к новой прошивке. Проекты мы назовем Test07.
Попробуем как всегда скомпилировать код и запустить его в протеусе. Если всё нормально работает, то начинаем добавлять новый код.
Добавим ещё одну функцию, благо добавлять функции мы на прошлом занятии научились. Код функции разместим после функции segchar и до функции main. После из-за того, что мы будем внутри нашей новой функции вызывать функцию segchar.
Мало того, мы создадим не одну функцию, а целых две. В одну функцию мы разместим весь код инициализации нашего таймеру, а другая функция будет являться обработчиком прерывания от таймера, а такие функции они специфичны и вызывать их не требуется. Когда возникнет необходимость, они вызовутся сами в зависимости от определённых условий, которые были оговорены выше.
Поэтому первую функцию мы назвовём timer_ini
//———————————————
void timer_ini(void)
{
}
//———————————————
Также давайте наши функции, а также какие-то законченные блоки с объявлением глобальных переменных, с прототипами функций будем отделять друг от друга вот такими чёрточками, которые за счет наличия двух слешей впереди компилятор обрабатывать не будет и примет их за комментарии. За счёт этих отчерчиваний мы будем видеть, где заканчивается одна функция и начинается другая.
Данная функция, как мы видим не имеет ни каких аргументов — ни входных, не возвращаемых. Давайте сразу данную функцию вызовем в функции main()
unsigned char butcount=0, butstate=0;
timer_ini();
Теперь мы данную функцию начнём потихонечку наполнять кодом.
Начнем с регистра управления таймером, например с TCCR1B. Используя нашу любимую операцию «ИЛИ», мы в определённый бит регистра занесём единичку
void timer_ini(void)
{
TCCR1B |= (1<<WGM12); // устанавливаем режим СТС (сброс по совпадению)
Из комментария мы видим, что мы работает с битами режима, и установим мы из них только бит WGM12, остальные оставим нули. Исходя из этого мы сконфигурировали вот такой режим:
![]()
Также у таймера существует ещё вот такой регистр — TIMSK. Данный регистр отвечает за маски прерываний — Interrupt Mask. Доступен данный регистр для всех таймеров, не только для первого, он общий. В данном регистре мы установим бит OCIE1A, который включит нужный нам тип прерывания TIMER1 COMPA

TCCR1B |= (1<<WGM12); // устанавливаем режим СТС (сброс по совпадению)
TIMSK |= (1<<OCIE1A); //устанавливаем бит разрешения прерывания 1ого счетчика по совпадению с OCR1A(H и L)
Теперь давайте поиграемся с самими регистрами сравнения OCR1A(H и L). Для этого придётся немного посчитать. Регистр OCR1AH хранит старшую часть числа для сравнения, а регистр OCR1AL — младшую.
Но прежде чем посчитать, давайте пока напишем код с любыми значениями данного регистра и потом поправим, так как дальше мы будем инициализировать делитель и он тоже будет учавствовать в расчёте требуемого времени счёта. Без делителя таймер будет слишком быстро считать.
TIMSK |= (1<<OCIE1A); //устанавливаем бит разрешения прерывания 1ого счетчика по совпадению с OCR1A(H и L)
OCR1AH = 0b10000000; //записываем в регистр число для сравнения
OCR1AL = 0b00000000;
TCCR1B |= ();//установим делитель.
Пока никакой делитель не устанавливаем, так как мы его ещё не посчитали. Давайте мы этим и займёмся.
Пока у нас в регистре OCR1A находится число 0b1000000000000000, что соответствует десятичному числу 32768.
Микроконтроллер у нас работает, как мы договорились, на частоте 8000000 Гц.
Разделим 8000000 на 32768, получим приблизительно 244,14. Вот с такой частотой в герцах и будет работать наш таймер, если мы не применим делитель. То есть цифры наши будут меняться 244 раза в секунду, поэтому мы их даже не увидим. Поэтому нужно будет применить делитель частоты таймера. Выберем делитель на 256. Он нам как раз подойдёт, а ровно до 1 Гц мы скорректируем затем числом сравнения.
Вот какие существуют делители для 1 таймера
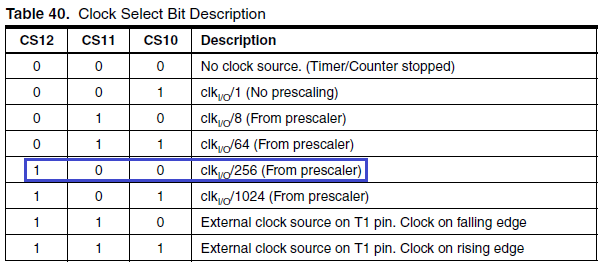
Я выделил в таблице требуемый нам делитель. Мы видим, что нам требуется установить только бит CS12.
Так как делитель частоты у нас 256, то на этот делитель мы поделим 8000000, получится 31250, вот такое вот мы и должны занести число в TCNT. До такого числа и будет считать наш таймер, чтобы досчитать до 1 секунды. Число 31250 — это в двоичном представлении 0b0111101000010010. Занесём данное число в регистровую пару, и также применим делитель
OCR1AH = 0b01111010; //записываем в регистр число для сравнения
OCR1AL = 0b00010010;
TCCR1B |= (1<<CS12);//установим делитель.
С данной функцией всё.
Теперь следующая функция — обработчик прерывания от таймера по совпадению. Пишется она вот так
ISR (TIMER1_COMPA_vect)
{
}
И тело этой функции будет выполняться само по факту наступления совпадения чисел.
Нам нужна будет переменная. Объявим её глобально, в начале файла
#include <util/delay.h>
//———————————————
unsigned char i;
//———————————————
Соответственно, из кода в функции main() мы такую же переменную уберём
int main(void)
{
unsigned char i;
Также закомментируем весь код в бесконечном цикле. Его роль теперь у нас будет выполнять таймер, и, я думаю, он с этим справится не хуже, а даже лучше, «никому» при этом не мешая.
while(1)
{
// for(i=0;i<10;i++)
// {
// while (butstate==0)
// {
// if (!(PINB&0b00000001))
// {
// if(butcount < 5)
// {
// butcount++;
// }
// else
// {
// i=0;
// butstate=1;
// }
// }
// else
// {
// if(butcount > 0)
// {
// butcount—;
// }
// else
// {
// butstate=1;
// }
// }
// }
// segchar(i);
// _delay_ms(500);
// butstate=0;
// }
}
Теперь, собственно, тело функции-обработчика. Здесь мы будем вызывать функцию segchar. Затем будем наращивать на 1 переменную i. И чтобы она не ушла за пределы однозначного числа, будем её обнулять при данном условии
ISR (TIMER1_COMPA_vect)
{
if(i>9) i=0;
segchar(i);
i++;
}
Теперь немного исправим код вначале функции main(). Порт D, отвечающий за состояние сегментов, забьём единичками, чтобы при включении у нас не светился индикатор, так как он с общим анодом. Затем мы здесь занесём число 0 в глобавльную переменную i, просто для порядка. Вообще, как правило, при старте в неициализированных переменных и так всегда нули. Но мы всё же проинициализируем её. И, самое главное, чтобы прерывание от таймера работало, её недостаточно включить в инициализации таймера. Также вообще для работы всех прерываний необходимо разрешить глобальные прерывания. Для этого существует специальная функция sei() — Set Interrupt.
Теперь код будет вот таким
DDRB = 0x00;
PORTD = 0b11111111;
PORTB = 0b00000001;
i=0;
sei();
while(1)
Также ещё мы обязаны подключить файл библиотеки прерываний вначале файла
#include <avr/io.h>
#include <avr/interrupt.h>
#include <util/delay.h>
Также переменные для кнопки нам пока не потребуются, так как с кнопкой мы сегодня работать не будем. Закомментируем их
int main(void)
{
//unsigned char butcount=0, butstate=0;
timer_ini();
Соберём наш код и проверим его работоспособность сначала в протеусе. Если всё нормально работает, то проверим также в живой схеме
Всё у нас работает. Отлично!
Вот такой вот получился секундомер. Но так как у нас даже нет кварцевого резонатора, то данный секундомер нельзя назвать точным.
Тем не менее сегодня мы с вами много чему научились. Мы узнали о прерываниях, также научились их обрабатывать, Научились работать с таймерами, конфигурировать несколько новых регистров микроконтроллера, до этого мы работали только с регистрами портов. Также за счёт всего этого мы значительно разгрузили арифметическо-логическое устройство нашего микроконтроллера.
Приобрести программатор USBASP USBISP с адаптером можно здесь USBASP USBISP 3.3 с адаптером
Смотреть ВИДЕОУРОК в RuTube (нажмите на картинку)

Смотреть ВИДЕОУРОК в YouTube (нажмите на картинку)


Просто спасибо.
http://mainloop.ru/avr-atmega/avr-external-interrupt.html
TCCR1B |= ();
Что означают эти скобки?
Объединение
Объединение с чем?
С тем что было до этого в TCCR1B.
Вообще-то речь идет о конкретной записи, а именно:
TCCR1B |= ();//установим делитель.
И не понятно с чем же объединяется значение регистра TCCR1B.
Еще раз повторюсь, не что объединяется, а с чем…
Объясните подробнее.
С результатом, полученным в правой части операции.
Думаю, нужно заметить одну вещь:
В «теле» обработчика прерывания, насколько я стал понимать недавно, не желательно использовать вызов функции. На форуме я поднял эту тему, но пока никто не ответил.
Наверно, пока мало посетителей на форуме.
Может под каждым видео добавлять ссылку? А то так, если даже у вас будет в сутках 100 часов — не успеете всем отвечать.
Ну ни как не могу въехать. Вы записали
OCR1AH = 0b10000000; //записываем в регистр число для сравнения
OCR1AL = 0b00000000;
что соответствует десятичному числу 32768. Потом на основании этого числа подобрали делитель 256, потом поделили частоту процессора на 256 получилось 31250
ну дальше понятно.
Но первоначально Вы САМИ вписали OCR1AH = 0b10000000; и OCR1AL = 0b00000000; и как из этого получилась ровно 1 секунда — не догоняю! А очень хочется разобраться!
Спасибо за уроки!
Хотелось бы поподробней про эти строки:
TCCR1B |= (1<<WGM12);
TIMSK |= (1<<OCIE1A);
TCCR1B |= (1<<CS12)
Спасибо!
Биты WGM12, OCIE1A, CS12 устанавливаются в логическую единицу.
Доьрый день!Вопрос: если бы мы взяли делитель 64 то как бы выглядела строка TCCR1B |= (1<<CS12)?
спасибо!
Я думаю так: TCCR1B |= [(0<<CS11)&&(0<<CS10)]
Обыкновенная бинарная арифметика
Точно так же. Это конфигурация регистров.
я думаю что было бы так:
TCCR1B |= (1<<CS11); (1<<CS10) ;
TCCR1B |= (1<<CS11)|(1<<CS10);
Чему равно WGM12 или OCIE1A или CS12? Неясно как сделать операции TCCR1B |= (1<<WGM12);
TIMSK |= (1<<OCIE1A);
TCCR1B |= (1<<CS12)
Спасибо!
Есть такой документ
ATmega8_rus даташит на русском
там всё есть.
Здравствуйте! Я хотел спросить а в таймере 8-ом,16 битном чтобы реализовать задержку нужно всегда использовать регистр общего назначение,тоесть получается он как бы второй счётный регистр, тоесть в него значение записываются после ухода вектор прерывание и достижение 256 происходят какие то действия правильно?
Извините, пожалуйста,
а что должно было получиться?
И в протеусе и при реальном включении индикатор перепрыгивает некоторые цифры: 1 3 5 6 8 9 1 2 4 6….
Так и должно быть или я что-то напортачил? 0_о
Блин(((( а на авр ассемблере нету такого примера?? а то мы на лабах в институте на нем работаем а не на Си
Здравствуйте, вижу здесь многие понимают как написать программу — таймера.
Помогите пожалуйста в моем деле.
У меня появилась необходимость менять масло по истечению месяца работы на бензо-электро генераторе.
Проблем с паяльником, разводкой платы, вытравливанием — не имею (всё хорошо выходит).
Но вот с написанием программ под мк и компиляцией прошивок испытываю большие трудности.
Я понимаю что желаемая программа по созданию проста, но у меня не хватает знаний, терпения и опыта.
Если здесь есть отзывчивые программисты, откликнитесь.
Задача такова:
Генератор завожу пару раз в сутки на несколько часов. Нужно чтобы спустя месяц работы (720 часов) загорался светодиод на 5-10 секунд через каждые 10-15 минут, напоминая о необходимой замене масла. (700-720 часов работы светодиод не горит, а спустя это время начинает не навязчиво загораться каждые 10-15 минут на несколько секунд)
Планирую использовать pic16f77 или подобный с наличием энергонезависимой памяти для записи текущих показаний отработанного времени.
Почему мы делитель применяем к регистру TCCR1B , но затем работаем с регистром
с литерой «A»)?
Пробовал читать даташит на 328 мегу(у меня другой нет) и делать по принципу, указанному здесь, но ничего не работает(
Абсолютно не ясно, когда,где и какие регистры использовать(
Пока не приехали голые микроконтроллеры, купил светодиодов, пищалку, семисегментник с общим анодом, макетку и спаял себе колхозную «обучательную» платку с дополнительной возможностью подключения lcd1602 и какого-нибудь i2c шилда от ардуино. Вместо голого микроконтроллера использую имевшуюся у меня ардуино нано, а шью с помощью arduino uno через icsp, предварительно настроив соответствующим образом atmelstudio. То есть предыдущие уроки работают нормально, здесь разницы особой нет между микроконтроллерами. На таймере и произошел»спотыкач».
Вот моя функция инициализации таймера на 328:
void timer_ini(void){
PRR|=(0<<PRTIM1);//записываем нуль в бит PRTIM1 регистра PRR, тем самым включая таймер
TCCR1A|=(1<<WGM12);//устанавливаем режим работы таймера 1 "сброс по совпадению(СТС)" путем установки в регистре управления TCCR1A бита WGM12 в единицу. данные берем из даташита на микроконтроллер
TIMSK1|= (1<<OCIE1A);//устанавливаем бит разрешения прерывания 1ого счетчика по совпадению с OCR1A(H и L)
OCR1AH = 0b111101; //записываем в регистр число для сравнения:частоту работы микроконтроллера делим на выбранный делитель, получаем число, которое переводим в двоичный вид и записываем старший байт в OCR1AH, а младший в OCR1AL
OCR1AL = 0b00001001;
TCCR1A |= (1<<CS11)|(1<<CS10);//установим делитель 1024, частота при этом составит 16 000 000/1024 =15625(двоичное 11110100001001)
}
Что не так?
Читайте .pdf СВОЕГО контроллера. Там совсем другие написания регистров.
Попробовал откорректировать ваш код, всё завелось.Как так?Причем я только изменил TIMSK на TIMSK1. Частота работы процессора ни на что не повлияла.Почему?
В 328 для каждого счетчика есть свой регистр масок прерываний.
Придется третью неделю ковыряться здесь, чтобы все понять..
Спасибо за урок! Понял, конечно, не с первого раза, но все получилось)
Здравствуйте! Спасибо за уроки.
Не могу понять код TCCR1B |= (1<<WGM12)
В регистре TCCR1A в битах WG10 и WG11 должны быть нули, а в TCCR1B в бите WGM12 должно быть установлено 1 для включения режима CTC Т.е. значение 1 должно быть сдвинуто на 3 разряда влево и потом логическое сложение с регистром TCCR1B. Непонятно почему вместо цифры 3 стоит WGM12 в коде.
Объясните пожалуйста.
Здравствуйте! Извините за глупости, но можно ли этот код целиком (вместо «ЦЕЛИКОМ», видимо этикет чатов и форумов не проходили, капсом некрасиво)?
А разве нет ссылки на исходный код в конце страницы?
здраствуйте вопрос такой зачем использовать глобальные переменные разве не экономичнее использовать локальные (я про переменную i). И почему вы не используете uint8_t вместо
unsigned char разве это не влияет на переносимость кода
Вообще-то unsigned char более классический вариант, а uint8_t — это макроподстановка, описанная в stdint.
Здравствуйте. А как можно включить прерывание не на первом заполнении таймер счётчика, а на пример на 5 разе. Как пример 1 заполнение занимает 2 сек, а на пятом разе будет 10 сек. Итого прерывание должно сработать через 10 сек. В качестве примера покажите на таймер счётчике 0, для atmega8.
Выбрать число для сравнения и делитель, чтобы прерывание обрабатывалось через 10 секунд.
Админ постоянно исчезает, поэтому ответа ждать приходится очень долго)
невозможно найти atmega8. можно ли ползоватся плата ардуино с atmega 328p вместо ее? прошивка через програматор