
ESP8266. Урок 9. I2C. Подключаем внешний EEPROM

Продолжаем работать с микроконтроллером ESP8266, в частности с модулем NodeMCU, на которой он установлена. На данном уроке мы попробуем поработать с шиной I2C. Данный интерфейс в контроллере ESP8266 поддерживается только программно, в то же время посредством функционала библиотеки SDK всё же такая поддержка имеется, хоть и программная. Видимо, это обусловлено тем, что шина I2C используется везде для передачи данных и без неё никак нельзя просто обойтись. Давайте и мы попытаемся что-то передать и принять, настроив такую шину.
Урок здесь
Видеоурок здесь (нажмите на картинку)

STM32. Урок 187. LL. STM32F1. ADC. Regular Continuous. Interrupt

Продолжаем работу с библиотекой LL (low-layer drivers). Продолжаем работать с АЦП (ADC) контроллера STM32F1 с использованием библиотеки LL. Также работать мы пока будем с регулярным каналом и отслеживать окончание процесса преобразования мы также будем при помощи механизма прерываний от АЦП, только в данном уроке мы попробуем уже поработать не с однократным преобразованием, которое нужно каждый раз в каждой итерации заново запускать, а применим автоматический механизм запуска.
Урок здесь
Видеоурок здесь (нажмите на картинку)

ESP8266. Урок 8. GPIO interrupt

Продолжаем работать с микроконтроллером ESP8266, в частности с модулем NodeMCU, на которой он установлена. На данном уроке мы попробуем отследить изменение состояния ножки порта GPIO посредством использования механизма прерываний.
Урок здесь
Видеоурок здесь (нажмите на картинку)
STM32. Урок 186. LL. STM32F1. ADC. Regular Once. Interrupt
Продолжаем работу с библиотекой LL (low-layer drivers). Продолжаем работать с АЦП (ADC) контроллера STM32F1 с использованием библиотеки LL. Также работать мы пока будем с однократным преобразованием и с регулярным каналом, только отследить окончание процесса преобразования мы попробуем при помощи механизма прерываний от АЦП.
Урок здесь
Видеоурок здесь (нажмите на картинку)

ESP8266. Урок 7. UART. Передача данных

Продолжаем работать с микроконтроллером ESP8266, в частности с модулем NodeMCU, на которой он установлена. На данном уроке мы попробуем передать какие-нибудь данные с нашего модуля по шине UART на ПК.
Урок здесь
Видеоурок здесь (нажмите на картинку)

STM32. Урок 185. STM32F1. LL. ADC. Regular Once. Часть 2
Продолжаем работу с библиотекой LL (low-layer drivers). И на данном уроке мы поработаем с такой периферией микроконтроллера, как АЦП (Аналого-цифровой преобразователь) или ADC (Analog-to-digital converter). И в данному уроке мы поработаем с АЦП в регулярном одиночном режиме. Контроллер мы будем использовать тот же — STM32F103. В данной части урока мы настроим проект, проанализируем код инициализации ADC, напишем и испытаем код измерения напряжения с помощью ADC на практике.
Урок здесь
Видеоурок здесь (нажмите на картинку)

STM32. Урок 185. STM32F1. LL. ADC. Regular Once. Часть 1
Продолжаем работу с библиотекой LL (low-layer drivers). И на данном уроке мы поработаем с такой периферией микроконтроллера, как АЦП (Аналого-цифровой преобразователь) или ADC (Analog-to-digital converter). И в данному уроке мы поработаем с АЦП в регулярном одиночном режиме. Контроллер мы будем использовать тот же — STM32F103. В данной части урока мы познакомимся с аппаратной организацией АЦП в контроллере, а также изучим его регистры и их биты.
Урок здесь
Видеоурок здесь (нажмите на картинку)

ESP8266. Урок 6. Подключаем кнопку
Продолжаем работать с микроконтроллером ESP8266, в частности с модулем NodeMCU, на которой он установлена. Мы попытаемся теперь настроить ножку порта GPIO на вход, чтобы отследить изменение уровня на ней и тем самым узнать, нажата ли кнопка. Писать прошивки мы будем в среде программирования Eclipse.
Урок здесь
Видеоурок здесь (нажмите на картинку)

STM32. Урок 184. CMSIS. STM32F1. USART. DMA

Продолжая изучать возможности библиотеки CMSIS, в данном занятии мы поработаем с возможностью использования периферии DMA при передаче данных по интерфейсу USART. Контроллер будем использовать STM32F103, расположенный на недорогой отладочной плате.
Урок здесь
Видеоурок здесь (нажмите на картинку)

ESP8266. Урок 5. Настраиваем toolchain. Первая прошивка в IDE Eclipse. Часть 2

Продолжаем работать с микроконтроллером ESP8266, в частности с модулем NodeMCU, на которой он установлена. Мы попытаемся собрать тулчейн для написания собственных прошивкок для последующего использования их на ESP8266. Писать прошивки мы будем в среде программирования Eclipse. В данной части урока мы закончим писать код нашего первого проекта, а также файл сценария Makefile, и проверим нашу первую прошивку в действии.
Урок здесь
Видеоурок здесь (нажмите на картинку)

ESP8266. Урок 5. Настраиваем toolchain. Первая прошивка в IDE Eclipse. Часть 1
Продолжаем работать с микроконтроллером ESP8266, в частности с модулем NodeMCU, на которой он установлена. Мы попытаемся собрать тулчейн для написания собственных прошивкок для последующего использования их на ESP8266. Писать прошивки мы будем в среде программирования Eclipse. В данной части урока мы подготовим все инструменты (тулчейн) для сборки прошивки из исходных файлов, создадим проект и начнём писать файл сценария Makefile, а также исходный код.
Урок здесь
Видеоурок здесь (нажмите на картинку)

STM32. Урок 183. CMSIS. STM32F1. USART. Interrupt
Продолжая изучать возможности библиотеки CMSIS, в данном занятии мы поработаем с механизмом обработки прерываний от шины USART. Контроллер будем использовать STM32F103, расположенный на недорогой отладочной плате.
Урок здесь
Видеоурок здесь (нажмите на картинку)
C. Урок 33. Аргументы командной строки
![]()
На данном уроке мы научимся пользоваться аргументами командной строки. При запуске программы из командной строки они являются параметрами. Мы узнаем, насколько параметры могут быть полезны и как они могут менять ход программы.
Урок здесь
Видеоурок здесь (нажмите на картинку)

STM32. Урок 182. CMSIS. STM32F1. USART. Приём данных

Продолжая изучать возможности библиотеки CMSIS, на данном уроке мы попытаемся поработать с помощью данной библиотеки с аппаратной реализацией шины USART (Universal synchronous asynchronous receiver transmitter) в контроллере STM32F1. Теперь мы попробуем также данные принять, а не только их передавать. Контроллер будем использовать STM32F103, расположенный на недорогой отладочной плате.
Урок здесь
Видеоурок здесь (нажмите на картинку)

C. Урок 32. Битовые поля
Продолжаем работать со структурами. Оказывается, кроме полей размером, кратным байту, мы можем в структурах (а также, конечно, и в объединениях) работать с битами. При этом применяются битовые поля, с которыми мы в данном уроке и познакомимся.
Урок здесь
Видеоурок здесь (нажмите на картинку)

STM32. Урок 181. USART. Передача данных
Продолжая изучать возможности библиотеки CMSIS, на данном уроке мы попытаемся поработать с помощью данной библиотеки с аппаратной реализацией шины USART (Universal synchronous asynchronous receiver transmitter) в контроллере STM32F1. В данном уроке мы будем работать с данной шиной только на передачу без использования прерываний и DMA. Контроллер будем использовать STM32F103, расположенный на недорогой отладочной плате.
Урок здесь
Видеоурок здесь (нажмите на картинку)

C. Урок 31. Выравнивание полей в структурах. Объединения
В данном уроке мы залезем немного глубже в структуры. Мы узнаем, как физически в располагаются данные их полей в памяти, как они выравниваются, каков порядок следования байтов в полях и как всем этим мы можем управлять. Также в этом занятии мы познакомимся с объединениями, как их объявить, как ими воспользоваться безопасно для работы наших программ.
Урок здесь
Видеоурок здесь (нажмите на картинку)

STM32. Урок 180. Дисплей TFT 240×320. SPI. DMA

Продолжаем работу с передачей данных по шине SPI. В данном занятии мы пытаемся продолжаем работать с дисплеем TFT разрешением 240×320, подключенным по шине SPI к микроконтроллеру STM32F407VG. Также вместе с данным дисплеем на данной плате установлен контроллер дисплея ILI9341, которым мы продолжим управлять. Только ко всему прочему в данном уроке мы отправку данных в дисплей будем производить с использованием технологии DMA. Отследим мы этот смысл с помощью логического анализатора. Посмотрим, что из этого получится.
Урок здесь
Видеоурок здесь (нажмите на картинку)

C. Урок 30. Указатели на функции. Часть 2
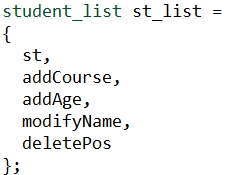
В данном уроке мы познакомимся с применением указателей на функции. Мы узнаем, какую огромную пользу это может принести в проектировании программ. Особенное внимание мы обратим на то, какой смысл имеют указатели на функции в качестве полей структур В данной части урока мы поработаем с массивами указателей на функции и увидим, как это порой бывает полезно.
Урок здесь
Видеоурок здесь (нажмите на картинку)

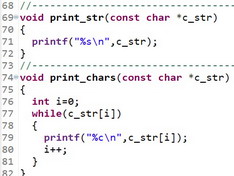
C. Урок 30. Указатели на функции. Часть 1
В данном уроке мы познакомимся с применением указателей на функции. Мы узнаем, какую огромную пользу это может принести в проектировании программ. Особенное внимание мы обратим на то, какой смысл имеют указатели на функции в качестве полей структур В данной части урока мы познакомимся с тем, как можно объявить указатель на функцию и им воспользоваться, также поработаем с этим на практике, а в том числе и с массивом таких указателей.
Урок здесь
Видеоурок здесь (нажмите на картинку)

STM32. Урок 179. Дисплей TFT 240×320. SPI. Часть 2

Продолжаем работу с передачей данных по шине SPI. В данном занятии мы пытаемся подключить к микроконтроллеру STM32F407VG дисплей TFT разрешением 240×320 по шине SPI. Также вместе с данным дисплеем на данной плате установлен контроллер дисплея ILI9341, которым мы и будем управлять. Подключим дисплей мы к отладочной плате STM32F4-DISCOVERY с контроллером STM32F407VG. В данной части урока мы напишем ещё несколько функций по работе с дисплеем, а также и проведём несколько тестов данных функций на практической схеме.
Урок здесь
Видеоурок здесь (нажмите на картинку)

STM32. Урок 179. Дисплей TFT 240×320. SPI. Часть 1
Продолжаем работу с передачей данных по шине SPI. В данном занятии мы пытаемся подключить к микроконтроллеру STM32F407VG дисплей TFT разрешением 240×320 по шине SPI. Также вместе с данным дисплеем на данной плате установлен контроллер дисплея ILI9341, которым мы и будем управлять. Подключим дисплей мы к отладочной плате STM32F4-DISCOVERY с контроллером STM32F407VG. В данной части урока мы подключим дисплей к плате, создадим проект, напишем инициализацию дисплея, некоторые служебные функции и первые тесты, проверив дисплей затем на практике.
Урок здесь
Видеоурок здесь (нажмите на картинку)

C. Урок 29. Указатели в аргументах функций. Часть 2
В данном уроке мы познакомимся с применением указателей на различные данные в памяти в аргументах функций. Мы узнаем, какую огромную пользу это может принести в проектировании программ. В данной части урока мы поработаем с указателями на структуру и на тип void.
Урок здесь
Видеоурок здесь (нажмите на картинку)

C. Урок 29. Указатели в аргументах функций. Часть 1
В данном уроке мы познакомимся с применением указателей на различные данные в памяти в аргументах функций. Мы узнаем, какую огромную пользу это может принести в проектировании программ. В данной части урока мы узнаем, как создать функцию с указателями в её аргументах, как такую функцию вызвать и также поработаем с передачей указателей на некоторые типы данных в аргументах функций на практике.
Урок здесь
Видеоурок здесь (нажмите на картинку)

STM32. Урок 178. CMSIS. STM32F1. SPI. DMA

Продолжаем работать с библиотекой CMSIS (Cortex Microcontroller Software Interface Standard). Продолжаем работу с передачей данных по шине SPI между двумя контроллерами STM32F1. И на данном уроке мы объединим наши знания по шине SPI и периферии DMA в контроллере STM32 и попробуем применить технологию DMA при передаче данных по интерфейсу SPI.
Урок здесь
Видеоурок здесь (нажмите на картинку)

C. Урок 28. Указатели на структуры

В данном уроке мы научимся пользоваться указателями на переменные типов структур, также научились адресоваться к отдельным полям при помощи указателей, используя при этом специальный оператор.
Урок здесь
Видеоурок здесь (нажмите на картинку)

STM32. Урок 177. CMSIS. STM32F1. SPI. Interrupt

Продолжаем работать с библиотекой CMSIS (Cortex Microcontroller Software Interface Standard). В данном уроке мы продолжим работу с передачей данных по шине SPI между двумя контроллерами STM32F1 и попробуем воспользоваться механизмом прерываний, организованным в периферии SPI в данном контроллере.
Урок здесь
Видеоурок здесь (нажмите на картинку)

C. Урок 27. Адресная арифметика. Часть 2
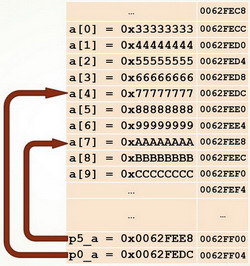
В данном уроке мы познакомимся с таким понятием, как адресная арифметика. Скорее всего, это даже не понятие, возможность производить над адресами и указателями какие-либо определённые арифметические действия. В данной части урока мы узнаем, какие нестандартные операции можно применять с указателями.
Урок здесь
Видеоурок здесь (нажмите на картинку)

C. Урок 27. Адресная арифметика. Часть 1
В данном уроке мы познакомимся с таким понятием, как адресная арифметика. Скорее всего, это даже не понятие, возможность производить над адресами и указателями какие-либо определённые арифметические действия. В данной части урока мы узнаем, какие существуют арифметические операции с указателями, а также поработаем с ними на практике.
Урок здесь
Видеоурок здесь (нажмите на картинку)

STM32. Урок 176. CMSIS. STM32F1. DMA. MEM2MEM
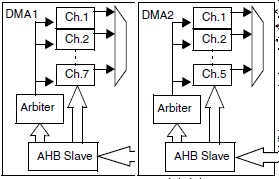
В данном уроке мы продолжим работать с библиотекой CMSIS (Cortex Microcontroller Software Interface Standard) и попытаемся поработать с периферией DMA контроллера STM32F1. Мы попробуем скопировать некоторое количество информации из одной области памяти в другую (MEM2MEM).
Урок здесь
Видеоурок здесь (нажмите на картинку)

C. Урок 26. Указатели и адреса. Часть 2
В данном уроке мы рассмотрим указатели и адреса, для чего они требуются и в каких случаях используются. Мы научимся находить адреса переменных и использовать их для доступа к самим переменным. В данной части урока мы отработаем все изученные в прошлой части приёмы с указателями и адресами на практике.
Урок здесь
Видеоурок здесь (нажмите на картинку)

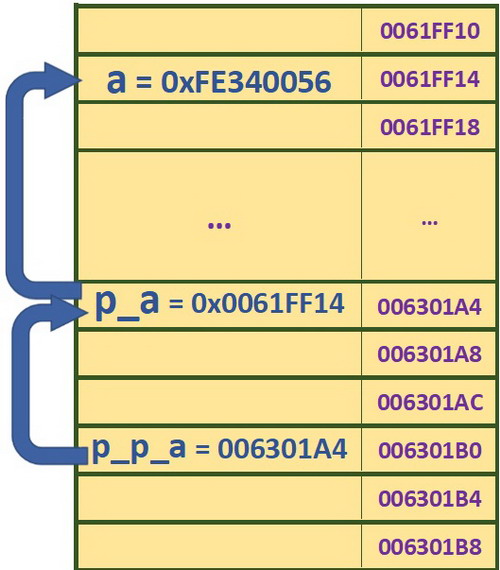
C. Урок 26. Указатели и адреса. Часть 1
В данном уроке мы рассмотрим указатели и адреса, для чего они требуются и в каких случаях используются. Мы научимся находить адреса переменных и использовать их для доступа к самим переменным. В данной части урока мы познакомимся с указателями, адресами, изучим операцию разыменовывания, также узнаем, как создать указатель на массив.
Урок здесь
Видеоурок здесь (нажмите на картинку)

STM32. Урок 175. CMSIS. STM32F1. SPI. Соединяем два контроллера
В данном уроке мы продолжим работать с библиотекой CMSIS (Cortex Microcontroller Software Interface Standard) и попробуем поработать с шиной SPI, которая поддерживается в нашем контроллере на аппаратном уровне. Мы попытаемся соединить между собой два контроллера STM32F1 между собой.
Урок здесь
Видеоурок здесь (нажмите на картинку)

