
AVR Урок 33. SPI. Карта SD. FAT. Часть 2
Урок 33
Часть 2
SPI. Карта SD. FAT
В прошлой части нашего занятия мы познакомились с флеш-картой SD, увидели, что она может работать как по интерфейсу SPI, так и по SDIO, но решили остановиться на SPI и уже начали писать исходный код. Остановились мы на том что написали реализацию передачи байта по интерфейсу SPI. Также узнали, что SPI у нас будет реализован программно.
Теперь создадим функцию для приёма байта из шины
//—————————————-
unsigned char SPI_ReceiveByte(void)
{
}
//—————————————-
Здесь нам уже потребуются две переменные
unsigned char SPI_ReceiveByte(void)
{
unsigned char i, result=0;
Также будет цикл
unsigned char i, result=0;
for(i=0;i<8;i++)
{
}
Теперь нам нужно будет наборот не дрыгать ножками, а отслеживать их состояние. Первым делом создадим положительный фронт, выставив высокий уровень на ножке SCK
for(i=0;i<8;i++)
{
PORTB|=(1<<SCK);//фронт на лапке SCK
Сдвигаем result влево на 1 пункт, чтобы подготовить место для нового бита. Если это будет самый первый цикл, то ничего страшного, у нас данная переменная все равно в нуле, поэтому не будем сочинять каких-то условий
PORTB|=(1<<SCK);//фронт на лапке SCK
result<<=1;//сдвигаем влево байт, чтобы записать очередной бит
Теперь, в случае если у нас уровень на ножке MISO равен 1, то запшем её в правый бит переменной ewsult
result<<=1;//сдвигаем влево байт, чтобы записать очередной бит
if((PINB&(1<<MISO))!=0x00)//запишем новый бит в младший разряд
result=result|0x01;//запишем считанный с лапки порта MISO бит
Затем отрицательный фронт на SCK и ждём 1 такт
result=result|0x01;//запишем считанный с лапки порта MISO бит
PORTB&=~(1<<SCK);//спад на лапке SCK
asm(«nop»);//1 такт подождём
Завершим цикл и вернём результат из функции
asm(«nop»);//1 такт подождём
}
return result;//вернем результат
}
Теперь нам нужно написать функцию передачи команд в SD.
Откроем пример в даташите
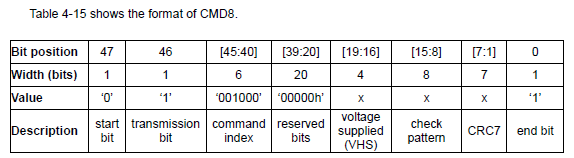
У каждой команды есть индекс. У данной команды индекс 8, так как она именуется CMD8. Также существуют различия в типах команд. Но об этом потом, нас пока интересует именно такой тип, причём именно эту команду нам потом также придется передавать.
Мы видим что передача команды состоит из 48 бит, то есть из 6 байтов. Первая строка показывает позицию бита в команде, вторая — величину параметра в битах, третья — значение, а четвёртая — разъяснение параметра.
Стартовый бит — всегда 0.
Бит передачи — 1.
индекс команды — в случае данной команды равен 8.
затем идут зарезервированные биты — целых 20 штук, все равные нулю.
Затем идут параметры, 7 бит контрольной суммы и стоповый бит — всегда 1.
Поэтому нам нужно будет написать функцию передачи команды.
Напишем её после наших функций передачи и приёма байтов, так как новая функция этими функциями будет пользоваться
//—————————————-
unsigned char SD_cmd (char dt0,char dt1,char dt2,char dt3,char dt4,char dt5)
{
}
//—————————————-
Вот сколько параметров. Прямо как у нас байтов в команде. Потом мы о них узнаем побольше
Добавим переменные
unsigned char SD_cmd (char dt0,char dt1,char dt2,char dt3,char dt4,char dt5)
{
unsigned char result;
long int cnt;
Отправим все параметры в шину
long int cnt;
SPI_SendByte(dt0); //индекс
SPI_SendByte(dt1); //Аргумент
SPI_SendByte(dt2);
SPI_SendByte(dt3);
SPI_SendByte(dt4);
SPI_SendByte(dt5); //контрольная сумма
Инициализируем счётчик
SPI_SendByte(dt5); //контрольная сумма
cnt=0;
Причём команды, которые мы передаём в карту, могут не только с помощью них чем-то управлять, кое-что могут и возвращать.
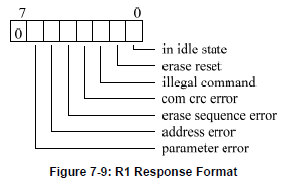
Причём возвращаемый результат, мало того, бывает разных типов (я выше говорил про типы команд, это ещё не то) — начинается от типа R1 и т.д.
Вот, например, тип R1
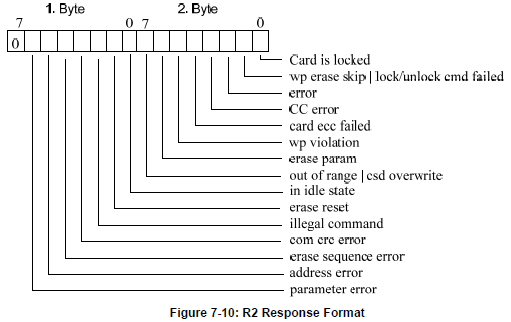
Вот R2
Пока нас интересует первый тип.
Добавим условный цикл в нашу функцию
cnt=0;
do
{ //Ждём ответ в формате R1 (даташит стр 109)
result=SPI_ReceiveByte();
cnt++;
} while (((result&0x80)!=0x00)&&cnt<0xFFFF);
Здесь мы ждём пока не прийдёт результат, постоянно принимая байт из шины. Как только байт придёт определённого формата, мы выйдем из функции и его передадим.
То есть должна возникнуть ситуация. когда условие в скобках перестанет выполняться, то есть если самый старший бит перестанет быть у нас не равным нулю, ну или счётчик досчитает до 16535 Это такой своего рода таймаут.
После этого мы вернём результат из нашей функции
} while (((result&0x80)!=0x00)&&cnt<0xFFFF);
return result;
}
То есть наша функция будет работать только с результатом 1 типа. Другие нам пока не нужны.
Ну и теперь мы наконец-то дошли до интересной функции. Эта функция — инициализация нашей карты. Создадим её ниже нашей только что написанной функции
//—————————————-
unsigned char SD_Init(void)
{
}
//—————————————-
Добавим переменные
unsigned char SD_Init(void)
{
unsigned char i,temp;
long int cnt;
Посмотрим рисунок из технической документации
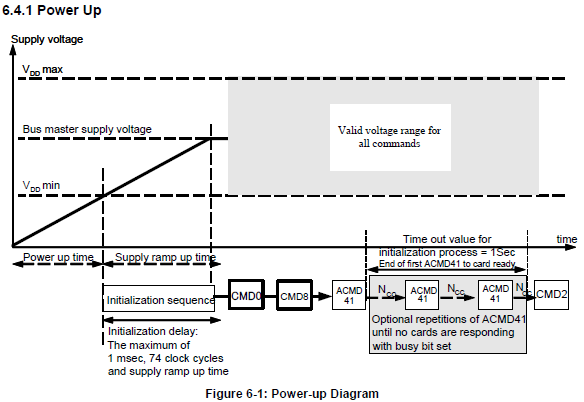
Сначала мы какое-то время ждём, затем подаём 74 импульса на шину SCK. Затем отправляем определённые команды.
Пока давайте подадим эти импульсы, их подать несложно
long int cnt;
for(i=0;i<10;i++) //80 импульсов (не менее 74) Даташит стр 91
SPI_SendByte(0xFF);
То есть мы отправим 10 байтов FF, тем самым получится 80 единичек. Причём шину SS мы перед передачей не опускаем. Правда импульсов на MOSI я здесь не заметил, будут 80 импульсов на ножке SCK при поднятой MOSI. Но главное работает. Остальное неважно. Вообще всё это дрыганье нужно для того, чтобы таким вот образом карта поняла, что работать мы с ней собираемся именно по SPI и переключилась в соответствующий режим.
А вот после этого только опустим SS
for(i=0;i<10;i++) //80 импульсов (не менее 74) Даташит стр 91
SPI_SendByte(0xFF);
PORTB&=~(1<<SS);//опускаем SS
Передадим команду CMD0
PORTB&=~(1<<SS);//опускаем SS
temp=SD_cmd(0x40,0x00,0x00,0x00,0x00,0x95); //CMD0 Даташит стр 102 и 96
Как выглядит данная команда, посмотрим на страницах, указанных в комментарии

Здесь мы видим, что данная коанда для перезагрузки карты, и видим что она должна вернуть нам GO_IDLE_STATE, то есть только нулевой бит должен быть в результате установлен.
![]()
А это входные аргументы.
Проверим возвращённый результат
temp=SD_cmd(0x40,0x00,0x00,0x00,0x00,0x95); //CMD0 Даташит стр 102 и 96
if(temp!=0x01) return 1; //Выйти если ответ не 0x01
Пошлём в шину байт FF, чтобы выдавить из сдвигового регистра карты весь мусор, и инициализируем счётчик
if(temp!=0x01) return 1; //Выйти если ответ не 0x01
SPI_SendByte(0xFF);
cnt=0;
Передадим теперь ещё команду CMD1, только исползуя такой же условный цикл, как мы использовали в предыдущей функции, и вернём результат, предварительно отеяв из него ненужное
cnt=0;
do
{
temp=SD_cmd(0x41,0x00,0x00,0x00,0x00,0x95); //CMD1 передаем также, меняется только индекс
SPI_SendByte(0xFF);
cnt++;
} while ((temp!=0x00)&&cnt<0xFFFF); //Ждёс ответа R1
if(cnt>=0xFFFF) return 2;
return 0;
}
Почему же CMD1, а не CMD8? Она же в принципе та же самая ACMD41
Посмотрим вот это дерево
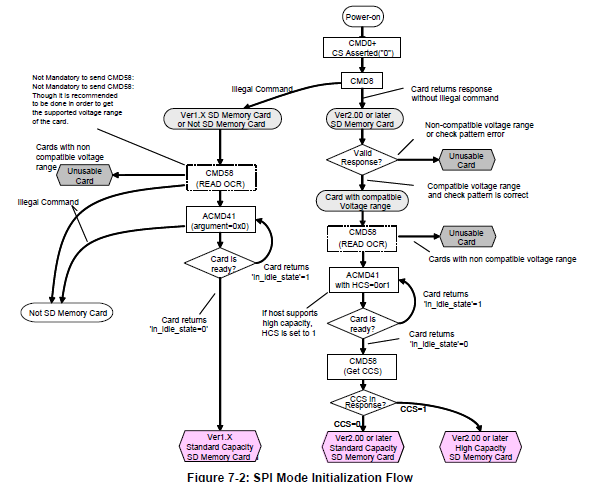
Хоть тут дерево и большое, но команды CMD8 и CMD58 нам требуются, если мы хотим узнать всё о нашей карте, особенно её тип. Мы пока будем считать, что мы уже знаем тип и нам достаточно будет только ACMD41. Вот так. Вообщем, потом посмотрим, если не будет работать, то мы всё же поработаем с данными командами. Вообще, в будщем они нам ещё будут нужны, когда мы будем уже читать файловую систему с карты.
Добавим строковую переменные в main() для того, чтобы что-то отобразить на дисплее и для результата
unsigned char i;
char str[10];
unsigned char result;
Вызовем нашу функцию инициализации, убавив перед ней немного задержку, и отобразим результат на дисплее
_delay_ms(1000);
result=SD_Init();
sprintf(str,«%d»,result);
clearlcd();//очистим дисплей
setpos(0,0);
str_lcd(str);
Соберём код и проверим пока результат в протеусе
У нас хороший результат, это очень хорошо, значит виртуальная карта видится. В видеоверсии были ошибки, так что обязательно посмотрите, как мы боремся с ошибками.
Файл с образом карты я также положу в архив с проектом.
Теперь прошьём контроллер и посмотрим результат на живом дисплее с живой картой SD
Отлично! Значит карта у нас инициализировалась и увиделась. А уже читать и писать на ней блоки мы будем в следующей части нашего интересного урока.
Предыдущая часть Программирование МК AVR Следующая часть
Техническая документация на Secure Digital
Программатор, модуль SD и дисплей можно приобрести здесь:
Программатор USBASP USBISP с адаптером USBASP USBISP 3.3 с адаптером
Смотреть ВИДЕОУРОК в RuTube (нажмите на картинку)

Смотреть ВИДЕОУРОК в YouTube (нажмите на картинку)


Получаю на LCD ответ 2. Вот код инициализации:
unsigned char SD_Init(void)
{
unsigned char i,temp;
long int cnt;
for(i=0;i<10;i++) //80 импульсов (не менее 74) Даташит стр 91
SPI_SendByte(0xFF);
PORTB&=~(1<<SS);//опускаем SS
temp=SD_cmd(0x40,0x00,0x00,0x00,0x00,0x95); //CMD0 Даташит стр 102 и 96
SPI_SendByte(0xFF);
if (temp!=0x01) return 1; //Выйти если ответ не 0x01
cnt=0;
do
{
temp=SD_cmd(0x41,0x00,0x00,0x00,0x00,0x95); //CMD1 передаем также, меняется только индекс
SPI_SendByte(0xFF);
cnt++;
} while ((temp!=0x00)&&cnt=0xFFFF) return 2;
return 0;
}
if (cnt>=0xFFFF) return 2;