
AVR Урок 53. Watchdog Timer (WDT). Часть 1
Уже более года мною не публиковалось уроков по контроллерам AVR. На это были различного рода причины.
Во-первых, я считал, что основные виды периферии и прочих составляющих данного контроллера нами уже изучены.
Во-вторых, у меня не было и нет нормального программатора, который бы виделся в среде разработки полноправно. Уроки без этого снимать можно, но готовить проекты для них, поверьте, очень тяжело.
В-третьих, с выходом более современных контроллеров интерес к данным контроллерам упал, хоть и незначительно, но всё же это есть.
Несмотря на это, я всё же, взвесив все «за» и «против», всё же решил ещё раз попытать счастья и выложить пару уроков (пока пару, а там посмотрим, как дело пойдёт) по данным микроконтроллерам.
Что же всё-таки сподвигло меня на данный шаг?
Во-первых, многочисленные просьбы посетителей моего ресурса, а также просьбы в личных сообщениях.
Во-вторых, новый хозяин данного семейства контроллеров Microchip, включил эти контроллеры в свою среду разработки MPLAB X, что позволит нам теперь обойтись сразу на два семейства одной средой разработки.
В-третьих, также выявились определённые темы, которые не были освещены в моем предыдущем, как я считал до этого, вполне исчерпывающем курсе занятий по контроллерам AVR.
И вот одним из неизведанных ещё нами модулей оказался модуль Watchdog Timer (WDT), который, как оказалось, много где используется и выполняет очень важные роли в работе программ. Тем более, меня ранее многие просили сделать по нему урок, но я либо недопонимал ценность данной периферии, либо был увлечён чем-то другим.
Вот и настало время наконец-то восполнить данный пробел.
Watchdog Timer (WDT) — это сторожевой таймер (а если перевести дословно, «сторожевой пёс»), который представляет собой аппаратно-реализованную схему контроля над зависанием системы. Это таймер, который периодически сбрасывается контролируемой системой. Если вдруг сброса не произошло за определённый интервал времени после предыдущего сброса данного таймера, то происходит принудительная перезагрузка системы (в нашем случае микроконтроллера).
В каких конкретных случаях мы можем применить данный таймер?
Например, мы ждём ответа от какой-нибудь шины (например I2C или ещё какой-то) в виде отслеживания состояния определённого бита регистра. И вдруг произойдёт кратковременное отсоединение провода этой шины. После этого скорей всего произойдёт зависание программы, так как в шине будет сбой, и даже если что-то после и придёт от присоединённого узла, то мы вряд ли уже это отследим изменением состояния бита. Желательно, чтобы после какого-то таймаута система перезагрузилась. Тут-то и приходит нам на помощь WDT, который установлен на определённый интервал. Команду на перезагрузку сторожевого таймера мы расположим в нашем коде после того, как мы дождёмся отклика от шины. А если мы так его и не дождёмся, то мы не дойдём до команды перезагрузки WDT и через заветный интервал времени система будет перезагружена. После этого произойдёт заново инициализация шины и всё будет опять работать нормально.
Понятно, что данная ситуация подходит только для случая, когда нам приходится не слишком долго ждать отклика от устройств, то есть именно тогда, когда у нас существует какой-то непрерывный процесс, в котором есть возможность ситуации сбоя. Таких примеров можно придумать много, поэтому Watchdog Timer очень много где применяется.
При работе с таймером в нашем коде мы не будем напрямую работать с его регистрами, так как там ещё надо проделывать очень много различных подготовительных мероприятий. Для этого существует отличная библиотека wdt.h, которая находится в стандартном комплекте для AVR и не требует дополнительного подключения откуда-то. Но тем не менее о том, как именно устроен сторожевой таймер в контроллере ATMega328, которым мы и будем сегодня пользоваться, мы всё же поговорим.
Таймер питается от отдельного генератора, который вместе с ним входит в логику перезагрузки контроллера

А вот это диаграмма сброса контроллера по истечении интервала времени
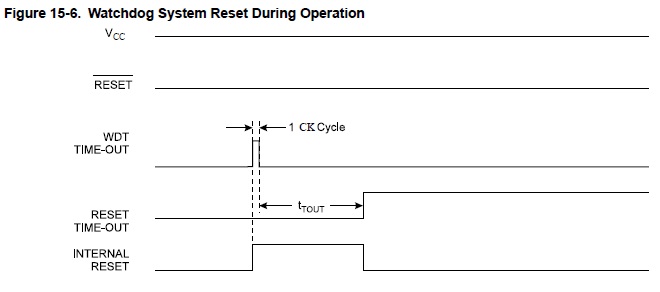
Кроме того, что мы можем сбросить сторожевой таймер где-то в коде, мы можем также и отследить окончание интервала времени по прерыванию, которое надо включить отдельно.
WDT, как и было указано выше, работает от отдельного генератора.
Также следует отметить, что диапазон интервалов данного таймера не бесконечен.
Давайте посмотрим блок-схему WDT
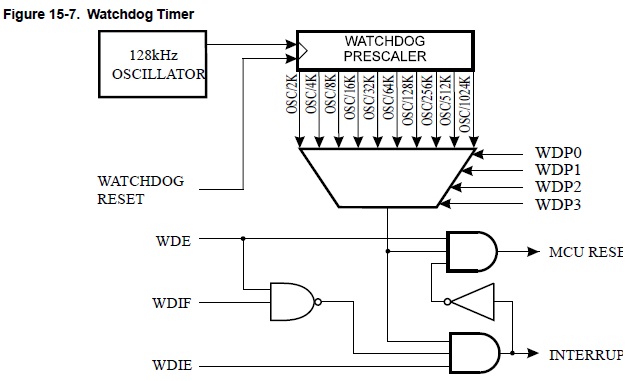
На рисунке мы видим, что после генератора на 128 килогерц, сигнал проходит на предделитель, который содержит 10 различных выходов с различным коэффициентом деления. Предделитель настраивается с помощью битов WDP3:WDP0 регистра WDTCSR. Таким образом, интервал времени работы WDT лежит в диапазоне от 15 милисекунд до 8 секунд.
Также мы видим, что с помощью бита WDIE мы можем разрешить прерывания от сторожевого таймера и затем попасть в обработчик, отслеживая состояние бита WDIF. Включается таймер с помощью бита WDE.
Вот он — управляющий регистр сторожевого таймера

Хоть мы уже и говорили о битах данного регистра выше, но всё же давайте все их рассмотрим подробно, их не так и много, так как у таймера всего один регистр
WDIF (Watchdog Interrupt Flag): флаг прерывания. Устанавливается в 1 в случае истечения интервала времени таймера. Сбрасывается аппаратно.
WDIE (Watchdog Interrupt Enable): бит разрешения прерываний от таймера. если установлен в 1, то прерывания разрешены, если в 0 — запрещены.
Существует таблица зависимости от состояния бетов WDE, WDIE, а также фьюза WDTON
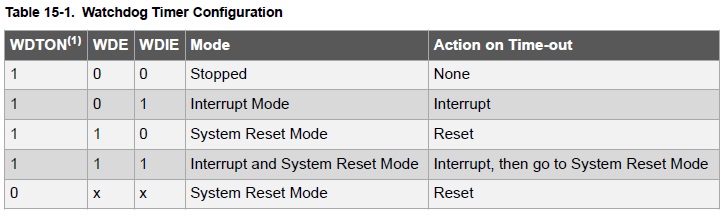
Из данной таблицы очень интересно то, что для того, чтобы работать с прерываниями от сторожевого таймера, его не обязательно включать. Достаточно лишь разрешить от него прерывания. Только если не включать, то прерывания работать будут, но таймер при этом не будет перезагружать систему.
WDP2:WDP0 (Watchdog Timer Prescaler): биты, устанавливающие коэффициент деления предделителя сторожевого таймера.
Вот таблица возможных комбинаций данных битов

Здесь также даны сами интервалы в единицах времени.
WDCE (Watchdog Change Enable): бит изменения, который должен быть предварительно включен перед тем, как мы соберёмся внести изменения в предделитель с целью изменения коэффициента деления либо для отключения таймера путём занесения в бит WDE значения 0. Сбрасывается аппаратно после четырех тактов.
WDE (Watchdog System Reset Enable): бит включения таймера, а вернее бит включения режима перезагрузки системы по истечению интервала времени таймера WDT.
Ну вот, я думаю и всё насчёт теории по сторожевому таймеру. Если что-то пропустил, то исправим это в процессе сочинения кода.
Код наш выполнять будет следующие задачи.
У нас, помимо WDT, будет также работать ещё таймер TIM1, данный таймер будет работать по совпадению, следовательно в обработчик прерываний от него мы будем попадать через определённое время периодично. В обработчике таймера мы будем периодично включать 10 ножек различных портов, а состояние их на какой-то момент мы будем определять по светодиодам, которые мы к ним подключим. Вернее, мы подключим светодиодную планку с 10-ю светодиодами, не забывая конечно о токоограничивающих резисторах, которые я на всякий случай подключил на 680 Ом, при этом светодиоды светятся вполне ярко. В начале программы мы запустим наш сторожевой таймер WDT и зададим ему определённый интервал времени срабатывания. В процедуре обработки прерываний от таймера 1 мы будем своевременно сбрасывать сторожевой таймер, поэтому, если всё у нас будет нормально с ходом программы, то система у нас будет работать и не перезагрузится.
А для того, чтобы проверить, перезагрузится ли наш WDT по истечению интервала, мы сэмулируем ситуацию, что наш таймер перестанет работать. Для этого мы подключим кнопку к контакту INT0 и обработаем от неё внешнее прерывание, в обработчике которого мы запретим прерывания от нашего таймера. Светодиоды, соответственно перестанут бежать, тем самым сигнализируя нам о том, что наш таймер 1 «сломался». Поэтому сторожевой таймер не перезагрузится, тем самым перезагрузит нашу систему и весь процесс у нас начнётся заново.
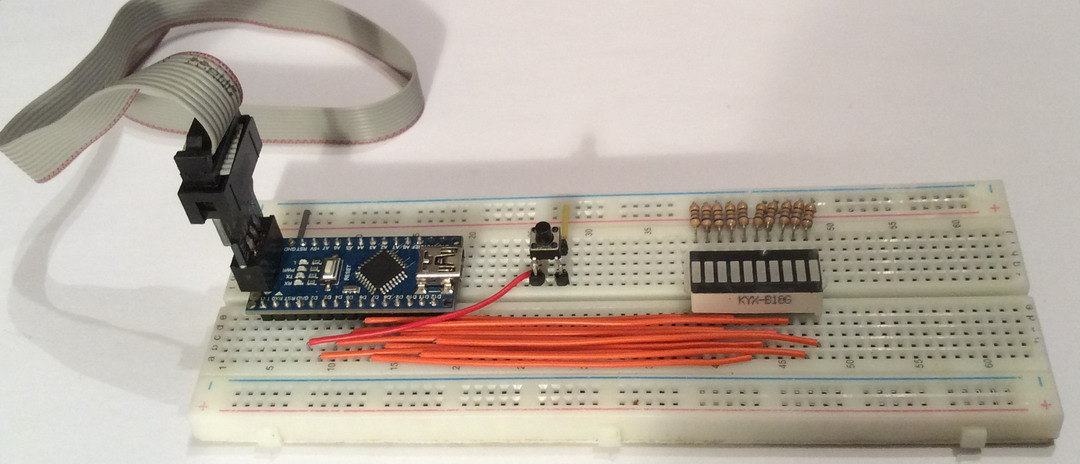
В качестве контроллера для урока мы возьмём контролер ATMega328P, расположенный на плате Arduino Nano, к которой подключим обычный USB-программатор через разъём ISP. Вставим нашу плату в макетную плату, подведём к ножке PD2 (INT0) кнопку, а также от ножек D3-D12 (ножки портов PD3:PD7, PB0:PB4) подключим аноды светодиодов планки, а катоды через токоограничивающие резисторы подключим к общему проводу
Проект мы создадим в среде программирования MPLAB X, с которой мы постоянно работаем с микроконтроллерами PIC, так как у данных контроллеров владелец один и тот же, то нет смысла использовать несколько сред для разработки. Как установить данную среду разработки, показано здесь.
Создание проекта по ссылке можно не смотреть, мы его все равно сейчас будем создавать заново.
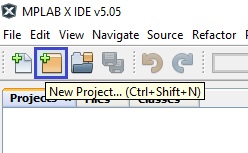
Запустим среду программирования MPLAB X и запустим создание проекта с помощью следующей кнопки
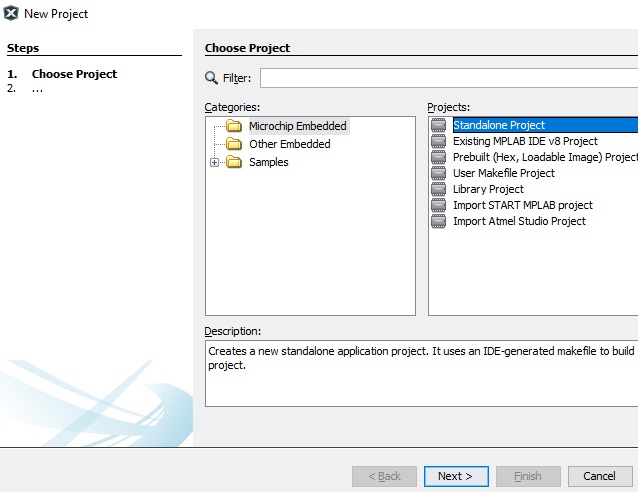
Выберем «Standalone Project» и идём далее
На следующем шаге выберем наш контроллер, перед этим отфильтровав контроллеры по семейству для удобства выбора, и движемся далее

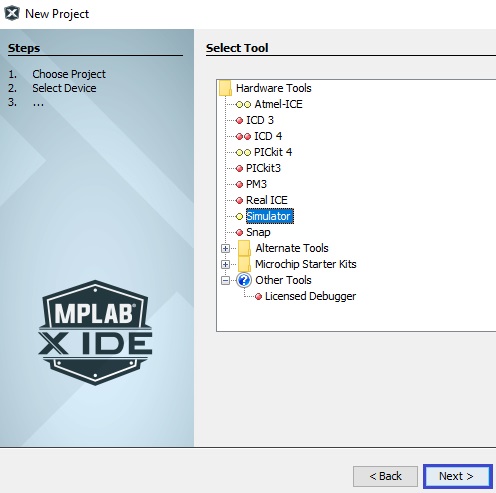
На следующем шаге в качестве программатора выберем Simulator и идём далее
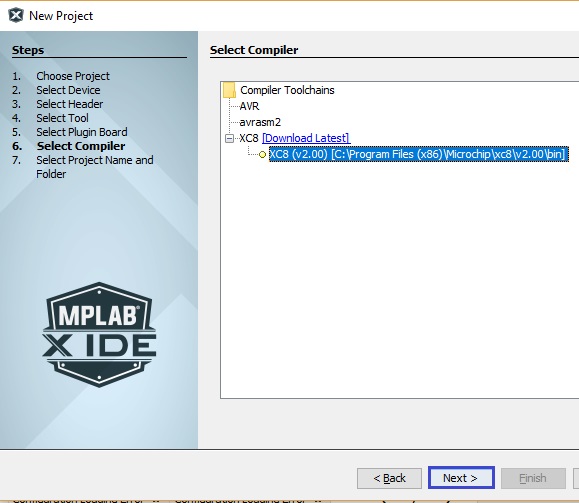
На следующем шаге выберем компилятор и идём дальше
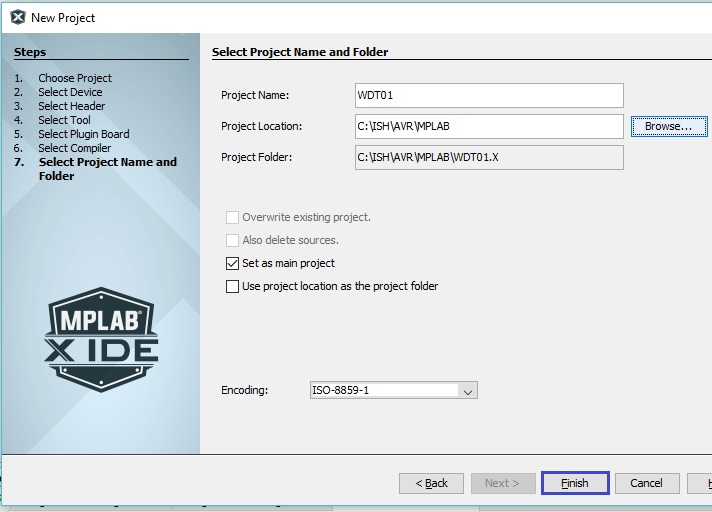
Дадим имя нашему проекту и жмём «Finish»
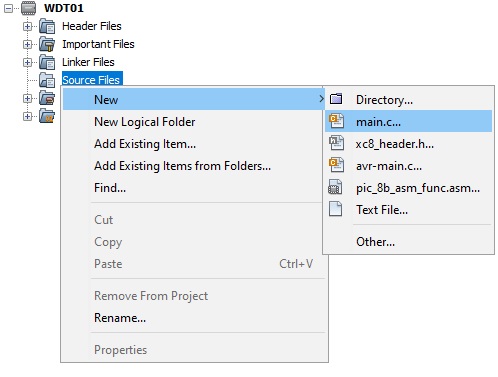
В дереве проекта в ветке Source Files добавим новый файл main.c с помощью контекстного меню на данной ветке
Исправим имя файла и нажмём «Finish»
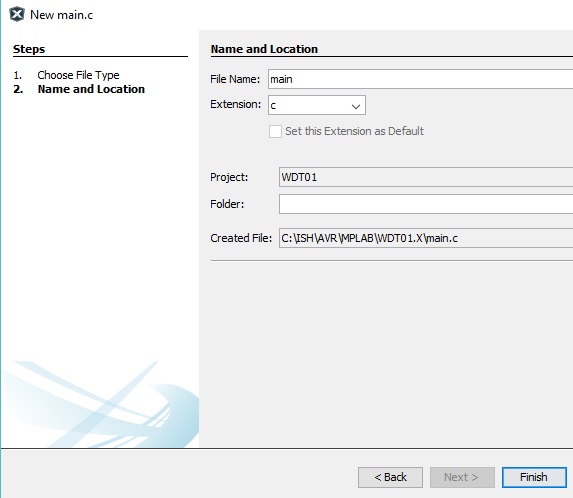
Файл main.c создан, чуть позже мы его исправим немного.
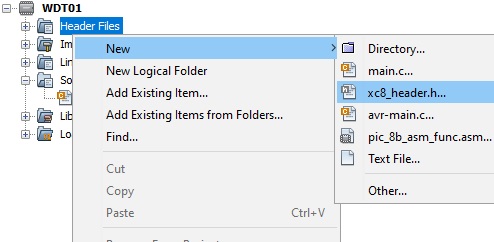
А пока создадим ещё заголовочный файл main.h аналогичным образом, только выбрав в контекстном меню на ветке «Header Files» и затем выбрав соответствующий пункт
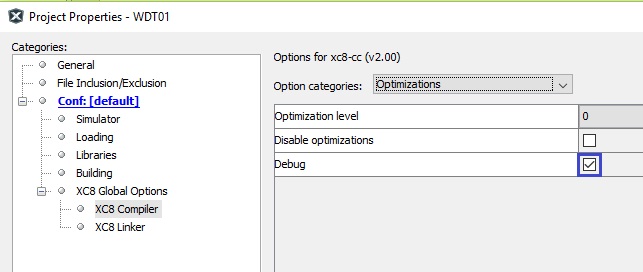
Для нормального функционирования функции задержки зайдём в свойства проекта и откроем там настройки компилятора, в которых выберем настройку оптимизации
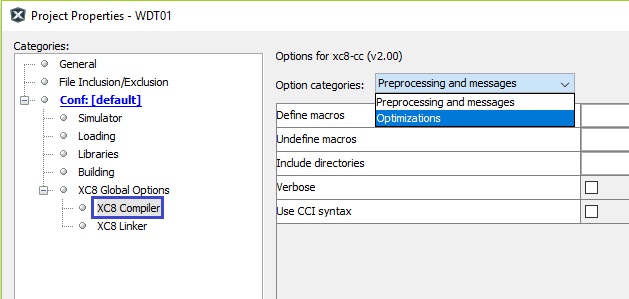
Оставим уровень оптимизации 0 и установим чекбокс на пункте Debug
Полностью удалим всё содержимое файла main.h и заменим его на следующее
|
1 2 3 4 5 6 7 8 9 10 11 |
#ifndef MAIN_H_ #define MAIN_H_ //-------------------------------------------------- #define F_CPU 16000000L //-------------------------------------------------- #include <avr/io.h> #include <avr/interrupt.h> #include <avr/wdt.h> #include <util/delay.h> //-------------------------------------------------- #endif /* MAIN_H_ */ |
Перейдём теперь в файл main.c, также очистим там всё содержимое, подключим в нём заголовочный файл и добавим точку входа — функцию main() с бесконечным циклом
|
1 2 3 4 5 6 7 8 9 |
#include "main.h" //----------------------------------------------------- int main(void) { while (1) { } } //----------------------------------------------------- |
В следующей части урока мы напишем проект и проверим работу сторожевого таймера на практике.
Приобрести плату Arduino Nano V3.0 оригинальный FT232RL можно здесь.
Приобрести программатор USBASP USBISP с адаптером можно здесь USBASP USBISP 3.3 с адаптером
Смотреть ВИДЕОУРОК в RuTube (нажмите на картинку)
")
Смотреть ВИДЕОУРОК в YouTube (нажмите на картинку)


Добавить комментарий