
STM Урок 42. Подключаем акселерометр LSM6DS0. Часть 1
Урок 42
Часть 1
Подключаем акселерометр LSM6DS0
Сегодня мы рассмотрим датчик, который в себе объединяет сразу два функционала – акселерометр и гироскоп. Данный акселерометр – это также акселерометр, выполненный с использованием технологии MEMS – LSM6DS0. Установлен он на плате расширения X-NUCLEO-IKS01A1, предназначенной для работы с отладочной платой Nucleo. Мы будем подключать данную оценочную плату к плате Nucleo STM32F401RE.
Данный акселерометр-гироскоп также наряду с интерфейсом I2C может подключиться и с использованием интерфейса SPI. Но мы будем использовать подключение именно по I2C, так как именно такое подключение имеет место в оценочной плате X-NUCLEO-IKS01A.
Также использовать в рамках данного занятия мы данный датчик будем только как акселерометр. В качестве гироскопа мы его подключим на более поздних занятиях.
Акселерометр в данном датчике имеет следующие технические характеристики:
Диапазон показаний ±2g/±4g/±8g/±16g;
Чувствительность 0.061 – 0.73 mg/digit;
Отклонение от нуля ±90 mg.
С некоторыми остальными показателями, регистрами, значениями и другими тонкостями акселерометра мы познакомимся в ходе его программирования.
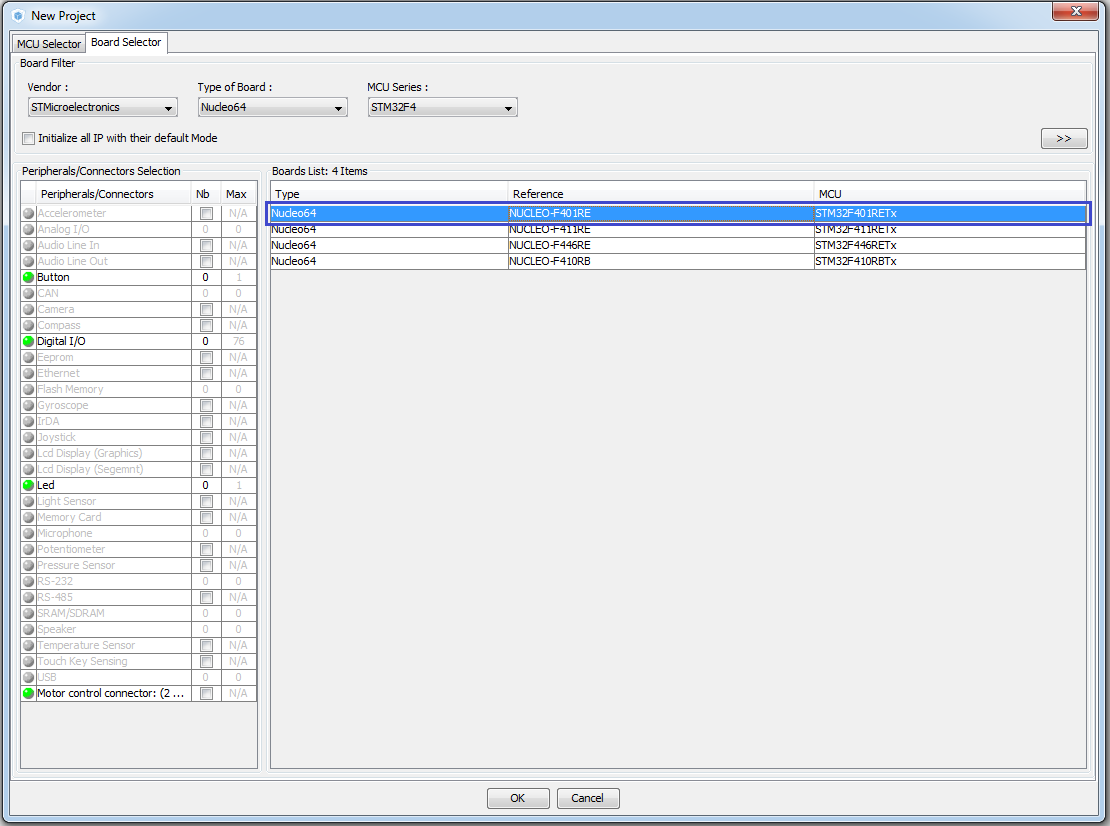
Создадим проект для в Cube MX. Выбирать мы будем не контроллер, а отладочную плату (нажмите на картинку для увеличения изображения)
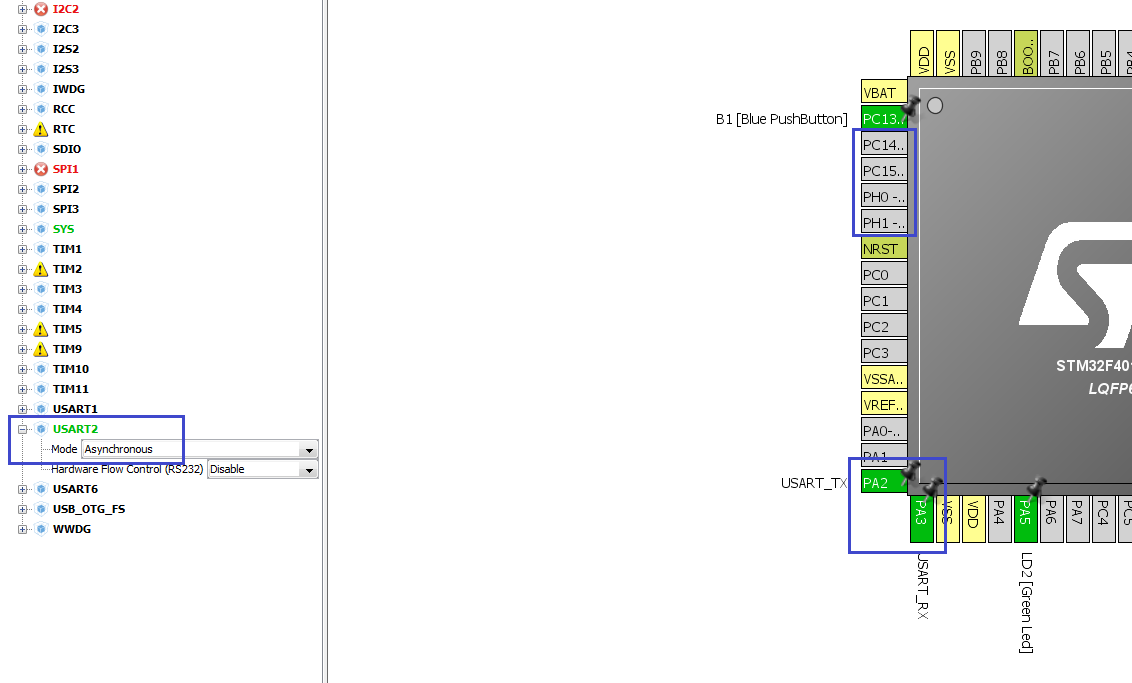
Отключим ножки портов PH0, PH1, PC14, PC15. USART 2 Включим в режим «Asynchronous» (нажмите на картинку для увеличения изображения)
Включим I2C1, только лапки SCL и SDA переопределим на лапки портов PB8 и PB9. Делается это нажатием левой кнопки мыши на ножку с зажатой клавишей Ctrl и дальнейшим переносом ее на возможную лапку (нажмите на картинку для увеличения изображения)

PA13 также отключим
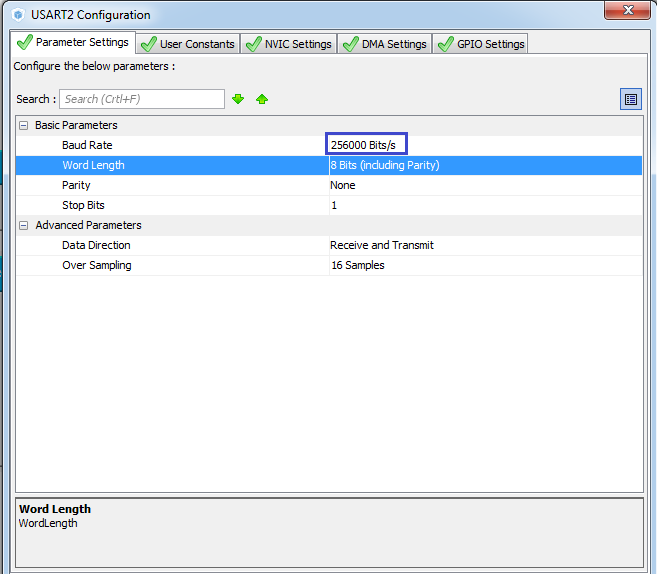
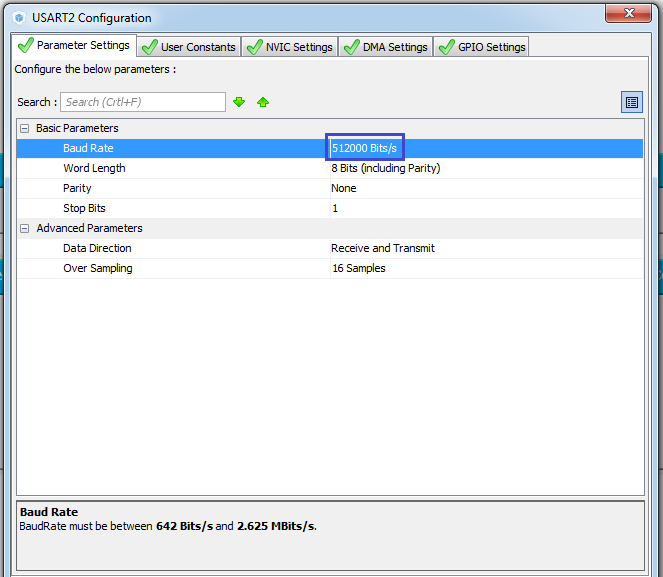
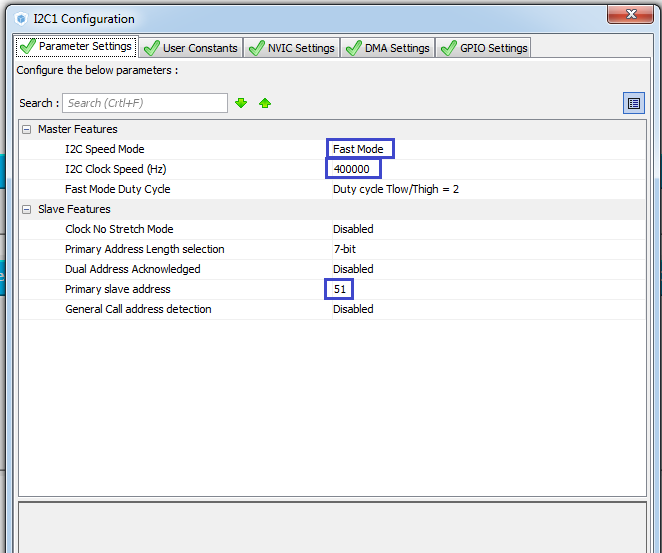
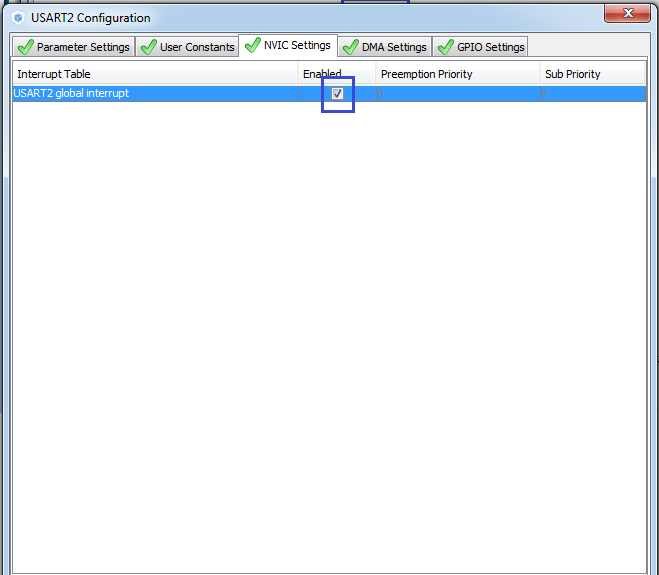
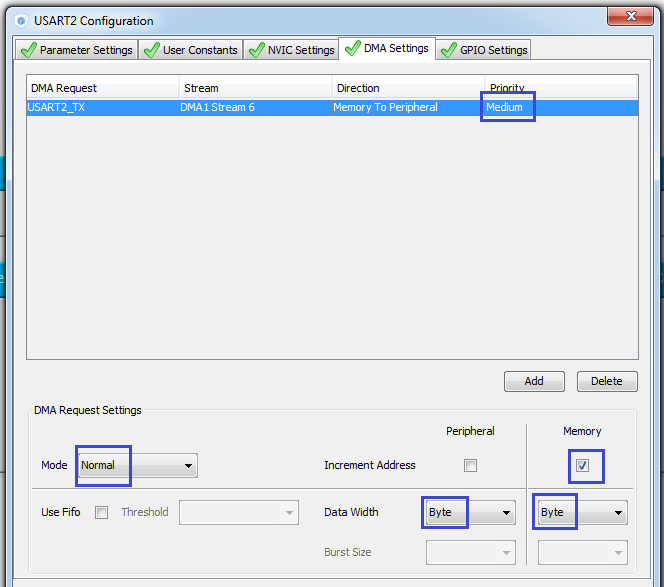
В Clock Configuration ничего не трогаем. В Configuration I2C настроим на 400 кГц, а USART на 256000 bps и включим на USART прерывания и DMA.
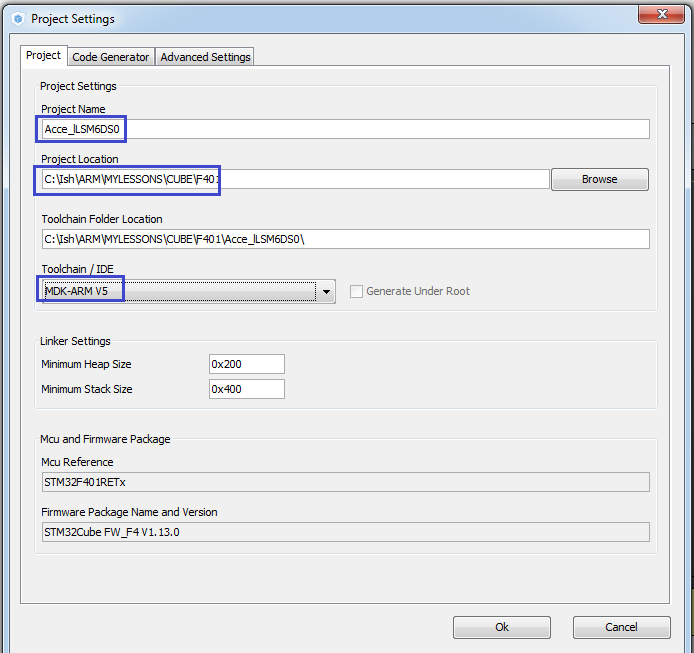
Настроим Project Settings, задав имя Acce_lLSM6DS0, среду программирования и путь к проекту. Путь у всех может быть разный.
Сгенерируем проект, откроем его. Настроим программатор на авторезет. Скомпилируем проект.
Для дальнейшего составления проекта мы можем воспользоваться опытом занятий с предыдущими датчиками. Файлы библиотек функций датчика мы возьмем с Вами с 39 урока, когда мы подключали датчик, установленный на плате STM32F303 Discovery, так как там мы также пользовались шинами I2C и USART.
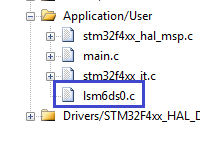
В папку Inc проекта мы скопируем файл main.h. Также в соответствующие папки Inc и Src мы скопируем файлы lsm303dlh.h lsm303dlh.c, соответственно переименовав их согласно наименованию нашего датчика в lsm6ds0.h и lsm6ds0.c.
Подключим файл main.h в файле main.c
/* USER CODE BEGIN Includes */
#include «main.h»
/* USER CODE END Includes */
Подключим также файл lsm6ds0.c
Файл main.h после некоторых исправлений станет вот такого содержания:
#ifndef MAIN_H_
#define MAIN_H_
#include «stm32f4xx_hal.h»
#include «lsm6ds0.h»
#endif /* MAIN_H_ */
Также подправим заголовочный файл lsm6ds0.h и уберем из него пока лишние макросы
#ifndef LIS3DSH_H_
#define LIS3DSH_H_
#include «stm32f4xx_hal.h»
#include <string.h>
//————————————————
#define ABS(x) (x < 0) ? (-x) : x
//————————————————
#define LD2_Pin GPIO_PIN_5
#define LD2_GPIO_Port GPIOA
#define LD2_ON HAL_GPIO_WritePin(GPIOA, GPIO_PIN_5, GPIO_PIN_SET) //GREEN
#define LD2_OFF HAL_GPIO_WritePin(GPIOA, GPIO_PIN_5, GPIO_PIN_RESET)
//————————————————
void Accel_Ini(void);
void Accel_ReadAcc(void);
//————————————————
#endif /* LIS3DSH_H_ */
Также подправим и уберем лишнее в файле lsm6ds0.c
#include «lsm6ds0.h»
//———————————————
extern I2C_HandleTypeDef hi2c1;
extern UART_HandleTypeDef huart2;
uint8_t buf2[14]={0};
char str1[30]={0};
//———————————————
void Error(void)
{
LD2_OFF;
}
//———————————————
static uint8_t I2Cx_ReadData(uint16_t Addr, uint8_t Reg)
{
HAL_StatusTypeDef status = HAL_OK;
uint8_t value = 0;
status = HAL_I2C_Mem_Read(&hi2c1, Addr, Reg, I2C_MEMADD_SIZE_8BIT, &value, 1, 0x10000);
if(status != HAL_OK) Error();
return value;
}
//———————————————
static void I2Cx_WriteData(uint16_t Addr, uint8_t Reg, uint8_t Value)
{
HAL_StatusTypeDef status = HAL_OK;
status = HAL_I2C_Mem_Write(&hi2c1, Addr, (uint16_t)Reg, I2C_MEMADD_SIZE_8BIT, &Value, 1, 0x10000);
if(status != HAL_OK) Error();
}
//———————————————
uint8_t Accel_IO_Read(uint16_t DeviceAddr, uint8_t RegisterAddr)
{
return I2Cx_ReadData(DeviceAddr, RegisterAddr);
}
//———————————————
void Accel_IO_Write(uint16_t DeviceAddr, uint8_t RegisterAddr, uint8_t Value)
{
I2Cx_WriteData(DeviceAddr, RegisterAddr, Value);
}
//———————————————
void Accel_GetXYZ(int16_t* pData)
{
uint8_t buffer[6];
uint8_t i=0;
for(i=0;i<3;i++)
{
}
}
//———————————————
uint8_t Accel_ReadID(void)
{
uint8_t ctrl = 0x00;
return ctrl;
}
//———————————————
void Accel_ReadAcc(void)
{
int16_t buffer[3] = {0};
int16_t xval, yval, zval;
Accel_GetXYZ(buffer);
xval=buffer[0];
yval=buffer[1];
zval=buffer[2];
// sprintf(str1,»X:%06d Y:%06d Z:%06d\r\n», xval, yval, zval);
// HAL_UART_Transmit(&huart2, (uint8_t*)str1,strlen(str1),0x1000);
buf2[0]=0x12;
buf2[1]=0x10;
buf2[2]=(uint8_t)(xval>>8);
buf2[3]=(uint8_t)xval;
buf2[4]=0x10;
buf2[5]=0x10;
buf2[6]=(uint8_t)(zval>>8);
buf2[7]=(uint8_t)zval;
buf2[8]=0x13;
HAL_UART_Transmit(&huart2,buf2,9,0×1000);
if(xval>1500)
{
}
HAL_Delay(20);
}
//———————————————
void AccInit(uint16_t InitStruct)
{
}
//———————————————
void Accel_Ini(void)
{
uint16_t ctrl = 0x0000;
HAL_Delay(1000);
AccInit(ctrl);
}
В функцию main добавим следующий код. Мы зажжем светодиод заранее, так как он у нас единственный на плате и вызовем функцию инициализации
/* USER CODE BEGIN 2 */
HAL_GPIO_WritePin(LD2_GPIO_Port, LD2_Pin, GPIO_PIN_SET);
Accel_Ini();
/* USER CODE END 2 */
Начнем, как обычно с попытки считать идентификатор датчика. Обратимся к технической документации. Найдем сначала адрес, необходимый для обращения к устройству по I2C. Если ножка SDO у нас соединена с землей, то 1 бит у нас 0, если с питанием, то 1. 0-й бит у нас будет 0, т.к. мы обращаемся сначала в режиме записи, если потребуется режим воспроизведения, то библиотека HAL сама возьмет на себя заботу об установке его в 1. Остается только узнать, куда же у нас подключена ножка SDO. Схему мне найти не удалось. Осталось 2 варианта, либо пробовать разные адреса, либо взять его из примера. Я выбрал 2й путь как более простой. Поэтому у нас адрес будет последний из таблицы 15 даташита — 11010110 (D6h). Также нам необходимо знать из какого регистра брать идентификатор и какой он должен быть у нашего датчика, чтобы применить в условии операцию сравнения. Данная информация находится на странице 38.
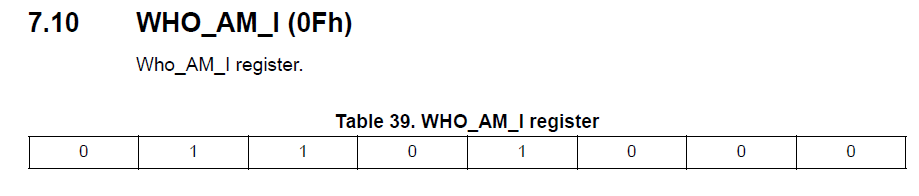
Поэтому добавим строку в функцию Accel_ReadID
uint8_t Accel_ReadID(void)
{
uint8_t ctrl = 0x00;
ctrl = Accel_IO_Read(0xD6,0x0F);
return ctrl;
}
//———————————————
Также вставим строки в функцию инициализации датчика
HAL_Delay(1000);
if(Accel_ReadID()==0x68) LD2_ON;
else Error();
AccInit(ctrl);
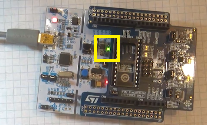
Соберем код и прошьем контроллер и проверим тем самым, тот ли у нас датчик, сравнив с образцовым идентификатором и включив единственный зеленый светодиод. Но так как светодиод у нас уже зажжен был на этапе старта программы, то нам теперь главное, чтобы она не погас.
Если светодиод у нас остался гореть, значит у нас все нормально и можно дальше продолжить писать код инициализации акселерометра
Добавим переменную в функцию AccInit
void AccInit(uint16_t InitStruct)
{
uint8_t value=0;
Добавим некоторые макросы в заголовочный файл lsm6ds0.h, скопировав их из заранее подготовленного файла
#define LD2_OFF HAL_GPIO_WritePin(GPIOA, GPIO_PIN_5, GPIO_PIN_RESET)
//————————————————
#define LSM6DS0_ACC_GYRO_BDU_DISABLE 0x00
#define LSM6DS0_ACC_GYRO_BDU_ENABLE 0x40
#define LSM6DS0_ACC_GYRO_BDU_MASK 0x40
//————————————————
#define LSM6DS0_ACC_GYRO_CTRL_REG5_XL 0X1F
#define LSM6DS0_ACC_GYRO_CTRL_REG6_XL 0X20
#define LSM6DS0_ACC_GYRO_CTRL_REG8 0X22
//————————————————
#define LSM6DS0_ACC_GYRO_ODR_XL_POWER_DOWN 0x00
#define LSM6DS0_ACC_GYRO_ODR_XL_10Hz 0x20
#define LSM6DS0_ACC_GYRO_ODR_XL_50Hz 0x40
#define LSM6DS0_ACC_GYRO_ODR_XL_119Hz 0x60
#define LSM6DS0_ACC_GYRO_ODR_XL_238Hz 0x80
#define LSM6DS0_ACC_GYRO_ODR_XL_476Hz 0xA0
#define LSM6DS0_ACC_GYRO_ODR_XL_952Hz 0xC0
//————————————————
#define LSM6DS0_ACC_GYRO_ODR_XL_MASK 0xE0
//————————————————
#define LSM6DS0_ACC_GYRO_FS_XL_2g 0x00
#define LSM6DS0_ACC_GYRO_FS_XL_16g 0x08
#define LSM6DS0_ACC_GYRO_FS_XL_4g 0x10
#define LSM6DS0_ACC_GYRO_FS_XL_8g 0x18
//————————————————
#define LSM6DS0_ACC_GYRO_FS_XL_MASK 0x18
//————————————————
#define LSM6DS0_ACC_GYRO_XEN_XL_ENABLE 0x08
#define LSM6DS0_ACC_GYRO_YEN_XL_ENABLE 0x10
#define LSM6DS0_ACC_GYRO_ZEN_XL_ENABLE 0x20
#define LSM6DS0_ACC_GYRO_XEN_XL_MASK 0x08
#define LSM6DS0_ACC_GYRO_YEN_XL_MASK 0x10
#define LSM6DS0_ACC_GYRO_ZEN_XL_MASK 0x20
//————————————————
#define LSM6DS0_ACC_GYRO_OUT_X_L_XL 0X28
#define LSM6DS0_ACC_GYRO_OUT_X_H_XL 0X29
#define LSM6DS0_ACC_GYRO_OUT_Y_L_XL 0X2A
#define LSM6DS0_ACC_GYRO_OUT_Y_H_XL 0X2B
#define LSM6DS0_ACC_GYRO_OUT_Z_L_XL 0X2C
#define LSM6DS0_ACC_GYRO_OUT_Z_H_XL 0X2D
//————————————————
void Accel_Ini(void);
Что означают данные настройки и регистры, мы будем разбирать по мере написания функций.
В следующей части занятия мы продолжим писать функцию инициализации датчика, затем напишем функцию считывания данных, и, более того, мы в данной части закончим работу с данным акселерометром.
Мы увидим показания и в текстовом виде и визуально с помощью программы NS Port Monitor.
Техническая документация на датчик
Техническая документация на плату расширения
Отладочную плату можно приобрести здесь Nucleo STM32F401RE
Оценочную плату можно приобрести здесь STM32 X-NUCLEO-IKS01A1
Смотреть ВИДЕОУРОК в RuTube (нажмите на картинку)

Смотреть ВИДЕОУРОК в YouTube (нажмите на картинку)


Добрый день.
Подскажите, пожалуйста, почему в настройках I2C Primary slave address = 51, а не D6?
Евгений: Здравствуйте!
Можете поставить любой. У нас контроллер работает в режиме Master.
static uint8_t I2Cx_ReadData(uint16_t Addr, uint8_t Reg)
{
HAL_StatusTypeDef status = HAL_OK;
uint8_t value = 0;
status = HAL_I2C_Mem_Read(&hi2c1, Addr, Reg, I2C_MEMADD_SIZE_8BIT, &value, 1, 0x10000);
if(status != HAL_OK) Error();
return value;
}
Не совсем понял откуда вы берете значения здесь, функция библиотеки хал status = HAL_I2C_Mem_Write(&hi2c1, Addr, (uint16_t)Reg, I2C_MEMADD_SIZE_8BIT, &Value, 1, 0x10000); возвращает значение HAL_OK и все. Данные откуда берутся? у меня программа 0 выводит постоянно.