
Урок 25
SPI. Подключаем сдвиговый регистр 74HC595
Сегодня мы продолжим работать с шиной SPI, которую мы изучили на предыдущем занятии. Вернее мы продолжим её — эту шину изучать, только занятие теперь будет практическое. Мы возьмём определённое устройсто и попробуем данным устройством поуправлять.
А в качестве устройства мы возьмём простейшую микросхему 74HC595, которая управляется именно по интерфейсу SPI и представляет собой сдвиговый регистр. Судя по технической документации на данный регистр, разработчиком его является компания Philips.
Обратим внимание на некоторые технические характеристики данного регистра сдвига.
Граничная частота тактирования не должна превышать 100 МГц, так что с нашими 8 или 16 МГц тактировой частоты контроллера мы вряд ли данную частоту превысим.
Напряжение питания микросхемы — от 2 до 6 В.
Данная микросхема существует в двух типах корпусов — обычный DIP, а также DHVQFN16, Мы будем использовать первый вариант, поэтому и посмотрим распиновку по данному варианту
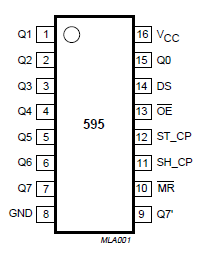
У микросхемы 16 ножек. Посмотрим их назначение в таблице
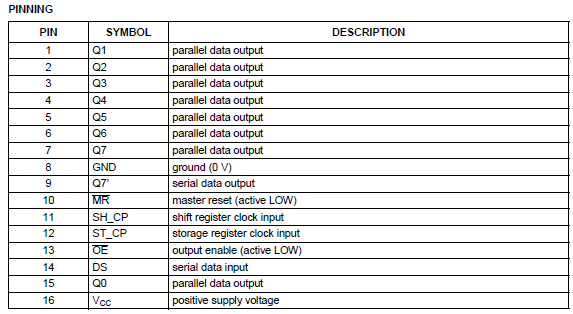
Немного расшифруем данные ножки
Q0-Q7 — восемь параллельных выходов общего назначения. Данные выходы нужны для того, чтобы мы могли как-то воспользоваться пришедшими данными по SPI — подключить линейку светодиодов, либо сегменты какого-то индикатора, либо дешифратор и т.д.
VCC — напряжение питания.
GND — общий провод.
Q7' — последовательный выход данных. Тот же самый MISO.
DS — последовательный вход данных или MOSI.
MR — это master reset. Будет изучен в процессе использования.
SH_CP — в нашем случае это будет chip select.
ST_CP — это ножка управления регистром хранения, в нашем случае это будет ножка синхронизации, на которую мы будем подавать тактовые импульсы.
OE — задействования выхода. При отрицательном значении последовательный выход включен, при положительном — выключен.
Также ещё нам поможет до конца понять назначение ножек поможет вот такая вот блок-схемка
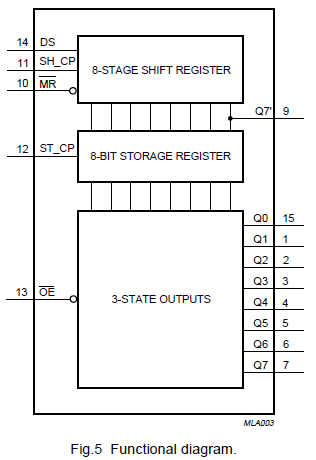
Самое интересное в данной схеме — то, что мы видим здесь не один регистр, а целых два. Один из них — это обычный сдвиговый регистр, в который приходят и из которого уходят наши данные по SPI. Но также есть ещё один регистр, в который эти данные попадают не автоматически, а при определённых условиях. Уже к этому регистру, называемому регистром хранения и привязан жестко параллельный 8-разрядный выход.
Поэтому перед нами теперь встаёт задача. Как же перенести наши данные из верхнего регистра в нижний. А, оказывается, для этого нам необходим квадратный импульс на ножке 12 — ST_CP. И отрицательный фронт данного импульса и «попросит» данные спуститься сверху вниз.
Следующая задача — подключить данный сдвиговый регистр 74HC595 к контроллеру ATmega8.
Так как мы не будем пользоваться последовательным выходом из нашей микросхемы, то вывод MISO контроллера мы задейстовать не будем.
А к ножкам параллельного выхода мы подключим светодиоды через токоограничивающие резисторы. Получится у нас вот такая схема
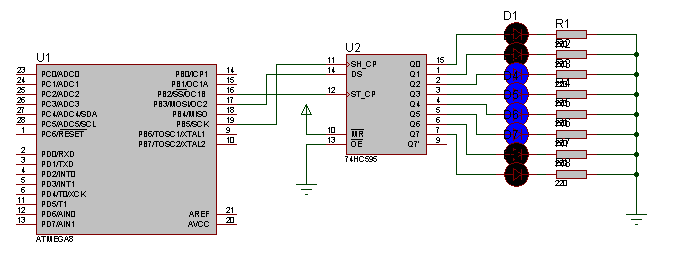
Вот так вот всё и подключается. Выход мы включили, хотя он нам не нужен. Позже понадобится. Включается как мы помним он ножкой OE низким уровнем. Выход MR нам не нужен. Он для перезагрузки, поэтому подтянем его к питанию. Ну и соответственно SPI. Здесь также всё несложно. Подключены ножки MISO, SCK и SS. Последнюю можно было подключить с любой ножки МК, так как она аппаратно не управляется.
Теперь нам необходимо как-то написать код и заставить всё это работать.
Создадим проект с именем MYSPI595, создадим и подключим заголовочный файл main.h со следующим содержимым
#ifndef MAIN_H_
#define MAIN_H_
#define F_CPU 8000000UL
#include <avr/io.h>
#include <avr/interrupt.h>
#include <util/delay.h>
#include <stdio.h>
#include <stdlib.h>
#endif /* MAIN_H_ */
Можно также воспользоваться примером, находящимся в технической документации на наш контрооллер в разделе по шине SPI.
Ну что ж, начнём придумывать.
Соответственно, как обычно, нам сначала необходимо будет настроить ножки портов. Все ножки SPI будут у нас настроены на выход, так как MISO мы не используем, а также мы на них установим низкий логический уровень
#include «main.h»
int main(void)
{
unsigned int i=0;
DDRB |= ((1<<PORTB2)|(1<<PORTB3)|(1<<PORTB5)); //ножки SPI на выход
PORTB &= ~((1<<PORTB2)|(1<<PORTB3)|(1<<PORTB5)); //низкий уровень
while(1)
{
}
}
Теперь настроим саму шину SPI
PORTB &= ~((1<<PORTB2)|(1<<PORTB3)|(1<<PORTB5)); //низкий уровень
SPCR = ((1<<SPE)|(1<<MSTR));//Включим шину, объявим ведущим
SPDR = 0b00000000;
Делитель и умножитель мы не включаем, так как частота на микросхеме поддерживается большая. Также мы включили SPI и настроили микроконтроллер ведущим устройством.
Затем занесли в регистр данных нули.
Ну теперь попробуем эти данные передать микросхеме
SPDR = 0b00000000;
while(!(SPSR & (1<<SPIF)));//подождем пока данные передадутся
То есть как только мы занесли в регистр данных значение, контроллер начнёт их пытаться передавать. После этого мы в цикле ждём того момента, когда включится бит SPIF в регистре SPSR. Как только он включится, это будет означать, что весь полный байт передался на ведомое устройство.
После этого, чтобы данные в регистре сдвига перешли в нижний регистр хранения, то мы должны сформировать там отрицательный фронт. Но, так как данная ножка SS уже находится в низком логическом уровне, то мы сначала включим ей высокий, а затем низкий, тем самым формируя отрицательный фронт или нисходящий
while(!(SPSR & (1<<SPIF)));//подождем пока данные передадутся
//сгенерируем отрицательный фронт для записи в STORAGE REGISTER
PORTB |= (1<<PORTB2); //высокий уровень
PORTB &= ~(1<<PORTB2); //низкий уровень
Тем самым мы в данном коде сформировали на всех ножках параллельного выхода микросхемы низкий логический уровень и светодиоды у нас должны будут погаснуть, если вдруг они загорелись как-то при старте.
Подождём две секунды и то же самое повторим ещё раз, но со всеми логическими единицами в регистре данных, тем самым все светодиоды, поддключенные к параллельному выходу микросхемы, должны будут засветиться. Затем подождём ещё две секунды
PORTB &= ~(1<<PORTB2); //низкий уровень
_delay_ms(2000);
SPDR = 0b11111111;
while(!(SPSR & (1<<SPIF)));//подождем пока данные передадутся
//сгенерируем отрицательный фронт для записи в STORAGE REGISTER
PORTB |= (1<<PORTB2); //высокий уровень
PORTB &= ~(1<<PORTB2); //низкий уровень
_delay_ms(2000);
while(1)
Посмотрим теперь схему на практике, как у нас всё собрано
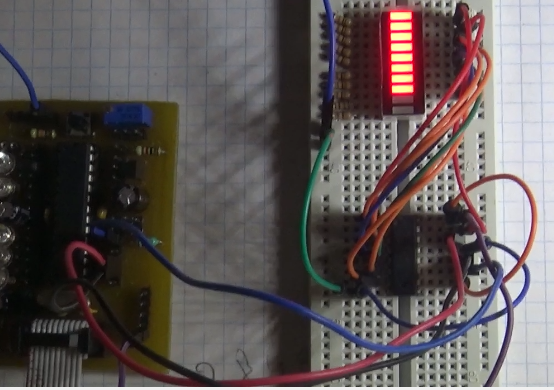
Всё подключено также, как мы и видели в протеусе. Вместо 8 светодиодов у нас подключена матрица светодиодов.
Попробуем собрать код и прошить наш контроллер. Сначала светодиоды находятся в потухшем состоянии и через 2 секунды они все начинают светиться. Значит всё у нас передалось.
Ну, и теперь для пущей красоты и для точного убеждения, что байты доходят правильно, не перевёртываются и не искажаются, мы напишем код в бесконечный цикл, который будет отправлять в шину SPI числа от 0 до 255, тем самым у нас на светодиодов будет иммитация инкрементирования двоичных чисел. В main() мы сначала добавим локальную переменную для счёта
int main(void)
{
unsigned int i=0;
Напишем теперь тело бесконечного цикла
while(1)
{
for (i=0;i<256;i++)
{
SPDR = i;
while(!(SPSR & (1<<SPIF)));//подождем пока данные передадутся
//сгенерируем отрицательный фронт для записи в STORAGE REGISTER
PORTB |= (1<<PORTB2); //высокий уровень
PORTB &= ~(1<<PORTB2); //низкий уровень
_delay_ms(50);
}
i=0;
}
Соберём код, прошьём контроллер и посмотрим результат нашей работы над кодом
Всё отлично работает.
Таким образом, мы теперь потренировались с шиной SPI на практике.
Предыдущий урок Программирование МК AVR Следующий урок
Техническая документация на микросхему 747HC595
Программатор и сдвиговые регистры можно приобрести здесь:
Программатор (продавец надёжный) USBASP USBISP 2.0
Сдвиговые регистры 74HC595N 10 шт
Смотреть ВИДЕОУРОК (нажмите на картинку)
 на
на

В тексте статьи указано, что "
SH_CP — в нашем случае это будет chip select.
ST_CP — это ножка управления регистром хранения, в нашем случае это будет ножка синхронизации, на которую мы будем подавать тактовые импульсы.",
но на схеме — наоборот. Поправьте описание ножек.
Да вроде всё нормально. ST_CP — она же PORTB2. Мы этой ножкой щёлкаем каждый бит. То есть тем самым создаём иммитацию импульсов тактирования. SH_CP — она же PORTB5 у нас всегда в низком уровне. Она и есть ножка выбора (именно в нашем случае). Если мы её поднимем в высокий уровень, передача прикроется.
В уроке противоречия, согласен с shemotehnik.
Добрый день! Просто немного непонятно. Получается щёлкать бит можно любой ногой? Для данного случая sh_cp можно было просто посадить на землю?
Ножка выбора SS(у контроллера) соединена с «ST_CP — это ножка управления регистром хранения, в нашем случае это будет ножка синхронизации, на которую мы будем подавать тактовые импульсы».
Ножка SCK(у контроллера) соединена с «SH_CP — в нашем случае это будет chip select». Почему наоборот?
Спасибо!
У вас ошибка. Читаем даташит:
SH_CP — shift register clock input, то есть вход для синхроимпульсов сдвигового регистра
ST_CP — storage register clock input, то есть вход для синхроимпульсов регистра хранения.
Отсюда можно сделать вывод, что к SH_CP нужно подключать как раз SCK от мастера, а к ST_CP любой другой пин, который нужно будет дергать, чтобы данные попали из сдвигового регистра в регистр хранения. Как таковой CS/SS (chip select) от SPI здесь толком-то и не нужен.
И да, последний пример — отображение чисел в двоичном виде с помощью цикла от 0 до 255 работать будет неправильно. Ибо DORD бит в SPCR у вас установлен в 0, таким образом данные будут передаваться от старшего бита к младшему (MSB), т.е. старший бит в сдвиговом регистре уедет в младший и к примеру вместо 0b00000001 на выходе получите 0b10000000
А SN74HC595N подойдет вместо 74HC595?
это одна и та же микросхема)))
Это получается мы можем используя SPI Затратив заранее 4 лапки, и в дальнейшем на каждое устройство подключенное по SPi затрагивать дополнительно 1 лапку на устройство? т.е. 1 устройство 5 лап, 3 устройства — 7 лап?
А если подключить Сдвиговый регистр, то мы им можем экономить 7 лап, не учитывая лапки SPI
Можно реализовать на этой микросхеме свой драйвер для дисплея 16×2? или не получится из за таймингов? типо высокий уровень, ждем 50us низкий 50us.
Алексей, можно и LCD управлять через регистр. Тайминги и прочее так же реализуется, скорость работы позволяет.
На просторах сети встречал кодогенератор, axlib называется -там это реализовано ( почему-то ее сайт на данный момент недоступен )
Добрый день.
Даниилу по DORD.
У автора правильно. Байт заходит как бы вперед головой. После первого такта MSB и вправду оказывается на месте LSB, но с каждым новым тактом он сдвигается на свое место. Наверное поэтому и сделали DORD по умолчанию низким.
В Протеусе я сделал бегущий огонь. Установишь DORD в единицу-он бежит в обратную сторону.
Автору спасибо за его уроки. Лично мне он привил вкус к этим вещам. Этого никто больше не делает.
Добрый день. Можно ли использовать данный сдвиговый регистр для опроса матричной клавиатуры(желательно с примером). Заранее спасибо
Почему нет? Регист внешний с входом, МК принимает код и расшифровует его, понимая какая (какие кнопки нажаты (замкнуты) ну или наоборот разомкнуты — бывает и такое нужно)
Немного «перекрутил» ваш код, взяв функцию инит и трансмит из даташита.
Но можно и в функции наворотить всяких циклов.
Включает всё одновременно
#include «main.h»
void SPI_MasterInit(void)
{
DDRB |= (1<<2)|(1<<3)|(1<<5);
PORTB &= ~((1<<2)|(1<<3)|(1<<5));
SPCR = (1<<SPE)|(1<<MSTR);
}
void SPI_MasterTransmit(char cData)
{
SPDR = cData;
while(!(SPSR & (1<<SPIF)));
}
int main(void)
{
SPI_MasterInit();
char d = 0b11111111;
char c = 0b00000000;
while(1)
{
SPI_MasterTransmit(c);
PORTB |= (1<<2);
PORTB &= ~(1<<2);
_delay_ms(2000);
SPI_MasterTransmit(d);
PORTB |= (1<<2);
PORTB &= ~(1<<2);
_delay_ms(2000);
}
}