
STM Урок 43. Подключаем акселерометр LSM6DS3. Часть 1
Урок 43
Часть 1
Подключаем акселерометр LSM6DS3
Сегодня мы рассмотрим датчик, который также в себе объединяет сразу два функционала – акселерометр и гироскоп. Данный акселерометр – это также акселерометр, выполненный с использованием технологии MEMS – LSM6DS3. Установлен он на плате расширения STEVAL-MKI160V1, которая в свою очередь вставляется в плату расширения X-NUCLEO-IKS01A1, предназначенной для работы с отладочной платой Nucleo. Мы будем подключать данную оценочную плату к плате Nucleo STM32F401RE.
Данный акселерометр-гироскоп также наряду с интерфейсом I2C может подключиться и с использованием интерфейса SPI. Но мы будем использовать подключение именно по I2C.
Также использовать в рамках данного занятия мы данный датчик будем только как акселерометр. В качестве гироскопа мы его подключим на более поздних занятиях. По сравнению с рассмотренным нами на прошлом занятии акселерометром LSM6DS0, данный датчик имеет более лучшие характеристики::
Диапазон показаний ±2g/±4g/±8g/±16g;
Чувствительность 0.061 – 0.49 mg/digit;
Отклонение от нуля ±40 mg.
Скорость считывания данных 12,5 Гц – 6,66 кГц.
С некоторыми остальными показателями, регистрами, значениями и другими тонкостями акселерометра мы познакомимся в ходе его программирования.
Для программирования данного датчика мы создадим проект Accel_LSM6DS3 из предыдущего проекта Accel_LSM6DS0. Кроме этого мы также переименуем файлы lsm6ds0.h и lsm6ds0.c соответственно в lsm6ds3.h и lsm6ds3.c.
Запустим проект в Cube MX. Ничего там не будем трогать, даже скорость USART оставим 256000 б/с. Сгенерируем проект для Keil, откроем его, включим программатор на авторезет, подключим файл lsm6ds0.c.
Исправим в файле main.h в строке ноль на тройку
#include «stm32f4xx_hal.h»
#include «lsm6ds3.h»
То же самое проделаем и в файле lsm6ds3.c
#include «lsm6ds3.h»
//———————————————
Соберем проект.
Удалять пока ничего не будем. Файл lsm6ds3.h изменим до следующего состояния, скопировав в него заранее подготовленный код вместе со всеми макросами:
#ifndef LSM6DS3_H_
#define LSM6DS3_H_
#include «stm32f4xx_hal.h»
#include <string.h>
//————————————————
#define ABS(x) (x < 0) ? (-x) : x
//————————————————
#define LD2_Pin GPIO_PIN_5
#define LD2_GPIO_Port GPIOA
#define LD2_ON HAL_GPIO_WritePin(GPIOA, GPIO_PIN_5, GPIO_PIN_SET) //GREEN
#define LD2_OFF HAL_GPIO_WritePin(GPIOA, GPIO_PIN_5, GPIO_PIN_RESET)
//————————————————
#define LSM6DS3_ACC_GYRO_CTRL1_XL 0X10
#define LSM6DS3_ACC_GYRO_CTRL3_C 0X12
#define LSM6DS3_ACC_GYRO_FIFO_CTRL5 0X0A
#define LSM6DS3_ACC_GYRO_CTRL9_XL 0X18
//————————————————
#define LSM6DS3_ACC_GYRO_IF_INC_DISABLED 0x00
#define LSM6DS3_ACC_GYRO_IF_INC_ENABLED 0x04
#define LSM6DS3_ACC_GYRO_IF_INC_MASK 0x04
//————————————————
#define LSM6DS3_ACC_GYRO_BDU_CONTINUOS 0x00
#define LSM6DS3_ACC_GYRO_BDU_BLOCK_UPDATE 0x40
#define LSM6DS3_ACC_GYRO_BDU_MASK 0x40
//————————————————
#define LSM6DS3_ACC_GYRO_FIFO_MODE_BYPASS 0x00
#define LSM6DS3_ACC_GYRO_FIFO_MODE_FIFO 0x01
#define LSM6DS3_ACC_GYRO_FIFO_MODE_STREAM 0x02
#define LSM6DS3_ACC_GYRO_FIFO_MODE_STF 0x03
#define LSM6DS3_ACC_GYRO_FIFO_MODE_BTS 0x04
#define LSM6DS3_ACC_GYRO_FIFO_MODE_DYN_STREAM 0x05
#define LSM6DS3_ACC_GYRO_FIFO_MODE_DYN_STREAM_2 0x06
#define LSM6DS3_ACC_GYRO_FIFO_MODE_BTF 0x07
#define LSM6DS3_ACC_GYRO_FIFO_MODE_MASK 0x07
//————————————————
#define LSM6DS3_ACC_GYRO_ODR_XL_POWER_DOWN 0x00
#define LSM6DS3_ACC_GYRO_ODR_XL_13Hz 0x10
#define LSM6DS3_ACC_GYRO_ODR_XL_26Hz 0x20
#define LSM6DS3_ACC_GYRO_ODR_XL_52Hz 0x30
#define LSM6DS3_ACC_GYRO_ODR_XL_104Hz 0x40
#define LSM6DS3_ACC_GYRO_ODR_XL_208Hz 0x50
#define LSM6DS3_ACC_GYRO_ODR_XL_416Hz 0x60
#define LSM6DS3_ACC_GYRO_ODR_XL_833Hz 0x70
#define LSM6DS3_ACC_GYRO_ODR_XL_1660Hz 0x80
#define LSM6DS3_ACC_GYRO_ODR_XL_3330Hz 0x90
#define LSM6DS3_ACC_GYRO_ODR_XL_6660Hz 0xA0
#define LSM6DS3_ACC_GYRO_ODR_XL_13330Hz 0xB0
#define LSM6DS3_ACC_GYRO_ODR_XL_MASK 0xF0
//————————————————
#define LSM6DS3_ACC_GYRO_FS_XL_2g 0x00
#define LSM6DS3_ACC_GYRO_FS_XL_16g 0x04
#define LSM6DS3_ACC_GYRO_FS_XL_4g 0x08
#define LSM6DS3_ACC_GYRO_FS_XL_8g 0x0C
#define LSM6DS3_ACC_GYRO_FS_XL_MASK 0x0C
//————————————————
#define LSM6DS3_ACC_GYRO_XEN_XL_MASK 0x08
#define LSM6DS3_ACC_GYRO_YEN_XL_MASK 0x10
#define LSM6DS3_ACC_GYRO_ZEN_XL_MASK 0x20
#define LSM6DS3_ACC_GYRO_XEN_XL_ENABLED 0x08
#define LSM6DS3_ACC_GYRO_YEN_XL_ENABLED 0x10
#define LSM6DS3_ACC_GYRO_ZEN_XL_ENABLED 0x20
//————————————————
#define LSM6DS3_ACC_GYRO_OUTX_L_XL 0X28
#define LSM6DS3_ACC_GYRO_OUTX_H_XL 0X29
#define LSM6DS3_ACC_GYRO_OUTY_L_XL 0X2A
#define LSM6DS3_ACC_GYRO_OUTY_H_XL 0X2B
#define LSM6DS3_ACC_GYRO_OUTZ_L_XL 0X2C
#define LSM6DS3_ACC_GYRO_OUTZ_H_XL 0X2D
//————————————————
void Accel_Ini(void);
void Accel_ReadAcc(void);
//————————————————
#endif /* LSM6DS3_H_ */
Назначение макросов обсудим в процессе написания кода. Соберем проект. Ошибочный код пока закомментируем.
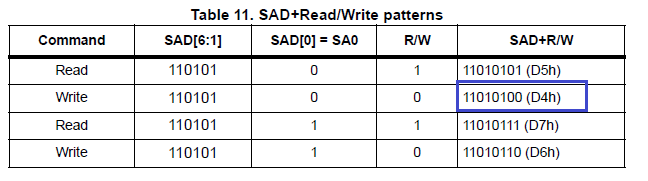
Найдем в технической документации адрес, по которому мы будем обращаться по I2C (стр. 35). В данной плате расширения разработчики ножку SA0 соединили с общим проводом для того, чтобы мы могли использовать оба датчика, и чтобы не было одинаковых адресов. Поэтому мы будем использовать 0xD4.
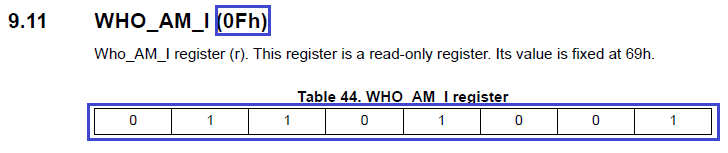
Найдем адрес регистра хранения идентификатора и сам идентификатор
Исправим код в чтении идентификатора
uint8_t ctrl = 0x00;
ctrl = Accel_IO_Read(0xD4,0x0F);
return ctrl;
Также исправим код в функции инициализации
HAL_Delay(1000);
if(Accel_ReadID()==0x69) LD2_ON;
else Error();
Подключим контроллер, соберём код и проверим, считался ли у нас идентификатор
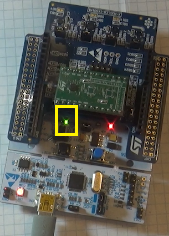
Светодиод светится зелёным цветом, значит идентификатор считан правильно.
Теперь начнем писать настройку датчика перед использованием
void AccInit(uint16_t InitStruct)
{
uint8_t value = 0;
//автоувеличение адреса регистра
value = Accel_IO_Read(0xD4,LSM6DS3_ACC_GYRO_CTRL3_C);
value&=~LSM6DS3_ACC_GYRO_IF_INC_MASK;
value|=LSM6DS3_ACC_GYRO_IF_INC_ENABLED;
Accel_IO_Write(0xD4,LSM6DS3_ACC_GYRO_CTRL3_C,value);
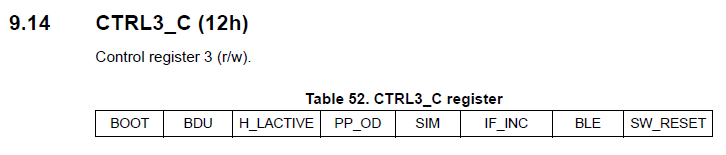
Данным кодом мы обращаемся к управляющему регистру 3 и включаем там бит автоувеличения адреса регистра

Пока на сегодня закончим с инициализацией.
В следующей части занятия мы полностью закончим нашу работу с данным датчиком.
Техническая документация на датчик
Техническая документация на оценочную плату
Отладочную плату можно приобрести здесь Nucleo STM32F401RE
Оценочную плату X-NUCLEO-IKS01A1 можно приобрести здесь STM32 X-NUCLEO-IKS01A1
Оценочную плату STEVAL-MKI160V1 можно приобрести здесь STEVAL-MKI160V1
Смотреть ВИДЕОУРОК в RuTube (нажмите на картинку)

Смотреть ВИДЕОУРОК в YouTube (нажмите на картинку)


Добавить комментарий