
Урок 43
Часть 1
Подключаем акселерометр LSM6DS3
Сегодня мы рассмотрим датчик, который также в себе объединяет сразу два функционала – акселерометр и гироскоп. Данный акселерометр – это также акселерометр, выполненный с использованием технологии MEMS – LSM6DS3. Установлен он на плате расширения STEVAL-MKI160V1, которая в свою очередь вставляется в плату расширения X-NUCLEO-IKS01A1, предназначенной для работы с отладочной платой Nucleo. Мы будем подключать данную оценочную плату к плате Nucleo STM32F401RE.
Данный акселерометр-гироскоп также наряду с интерфейсом I2C может подключиться и с использованием интерфейса SPI. Но мы будем использовать подключение именно по I2C.
Также использовать в рамках данного занятия мы данный датчик будем только как акселерометр. В качестве гироскопа мы его подключим на более поздних занятиях. По сравнению с рассмотренным нами на прошлом занятии акселерометром LSM6DS0, данный датчик имеет более лучшие характеристики::
Диапазон показаний ±2g/±4g/±8g/±16g;
Чувствительность 0.061 – 0.49 mg/digit;
Отклонение от нуля ±40 mg.
Скорость считывания данных 12,5 Гц – 6,66 кГц.
С некоторыми остальными показателями, регистрами, значениями и другими тонкостями акселерометра мы познакомимся в ходе его программирования.
Для программирования данного датчика мы создадим проект Accel_LSM6DS3 из предыдущего проекта Accel_LSM6DS0. Кроме этого мы также переименуем файлы lsm6ds0.h и lsm6ds0.c соответственно в lsm6ds3.h и lsm6ds3.c.
Запустим проект в Cube MX. Ничего там не будем трогать, даже скорость USART оставим 256000 б/с. Сгенерируем проект для Keil, откроем его, включим программатор на авторезет, подключим файл lsm6ds0.c.
Исправим в файле main.h в строке ноль на тройку
#include «stm32f4xx_hal.h»
#include «lsm6ds3.h»
То же самое проделаем и в файле lsm6ds3.c
#include «lsm6ds3.h»
//———————————————
Соберем проект.
Удалять пока ничего не будем. Файл lsm6ds3.h изменим до следующего состояния, скопировав в него заранее подготовленный код вместе со всеми макросами:
#ifndef LSM6DS3_H_
#define LSM6DS3_H_
#include «stm32f4xx_hal.h»
#include <string.h>
//————————————————
#define ABS(x) (x < 0) ? (-x) : x
//————————————————
#define LD2_Pin GPIO_PIN_5
#define LD2_GPIO_Port GPIOA
#define LD2_ON HAL_GPIO_WritePin(GPIOA, GPIO_PIN_5, GPIO_PIN_SET) //GREEN
#define LD2_OFF HAL_GPIO_WritePin(GPIOA, GPIO_PIN_5, GPIO_PIN_RESET)
//————————————————
#define LSM6DS3_ACC_GYRO_CTRL1_XL 0X10
#define LSM6DS3_ACC_GYRO_CTRL3_C 0X12
#define LSM6DS3_ACC_GYRO_FIFO_CTRL5 0X0A
#define LSM6DS3_ACC_GYRO_CTRL9_XL 0X18
//————————————————
#define LSM6DS3_ACC_GYRO_IF_INC_DISABLED 0x00
#define LSM6DS3_ACC_GYRO_IF_INC_ENABLED 0x04
#define LSM6DS3_ACC_GYRO_IF_INC_MASK 0x04
//————————————————
#define LSM6DS3_ACC_GYRO_BDU_CONTINUOS 0x00
#define LSM6DS3_ACC_GYRO_BDU_BLOCK_UPDATE 0x40
#define LSM6DS3_ACC_GYRO_BDU_MASK 0x40
//————————————————
#define LSM6DS3_ACC_GYRO_FIFO_MODE_BYPASS 0x00
#define LSM6DS3_ACC_GYRO_FIFO_MODE_FIFO 0x01
#define LSM6DS3_ACC_GYRO_FIFO_MODE_STREAM 0x02
#define LSM6DS3_ACC_GYRO_FIFO_MODE_STF 0x03
#define LSM6DS3_ACC_GYRO_FIFO_MODE_BTS 0x04
#define LSM6DS3_ACC_GYRO_FIFO_MODE_DYN_STREAM 0x05
#define LSM6DS3_ACC_GYRO_FIFO_MODE_DYN_STREAM_2 0x06
#define LSM6DS3_ACC_GYRO_FIFO_MODE_BTF 0x07
#define LSM6DS3_ACC_GYRO_FIFO_MODE_MASK 0x07
//————————————————
#define LSM6DS3_ACC_GYRO_ODR_XL_POWER_DOWN 0x00
#define LSM6DS3_ACC_GYRO_ODR_XL_13Hz 0x10
#define LSM6DS3_ACC_GYRO_ODR_XL_26Hz 0x20
#define LSM6DS3_ACC_GYRO_ODR_XL_52Hz 0x30
#define LSM6DS3_ACC_GYRO_ODR_XL_104Hz 0x40
#define LSM6DS3_ACC_GYRO_ODR_XL_208Hz 0x50
#define LSM6DS3_ACC_GYRO_ODR_XL_416Hz 0x60
#define LSM6DS3_ACC_GYRO_ODR_XL_833Hz 0x70
#define LSM6DS3_ACC_GYRO_ODR_XL_1660Hz 0x80
#define LSM6DS3_ACC_GYRO_ODR_XL_3330Hz 0x90
#define LSM6DS3_ACC_GYRO_ODR_XL_6660Hz 0xA0
#define LSM6DS3_ACC_GYRO_ODR_XL_13330Hz 0xB0
#define LSM6DS3_ACC_GYRO_ODR_XL_MASK 0xF0
//————————————————
#define LSM6DS3_ACC_GYRO_FS_XL_2g 0x00
#define LSM6DS3_ACC_GYRO_FS_XL_16g 0x04
#define LSM6DS3_ACC_GYRO_FS_XL_4g 0x08
#define LSM6DS3_ACC_GYRO_FS_XL_8g 0x0C
#define LSM6DS3_ACC_GYRO_FS_XL_MASK 0x0C
//————————————————
#define LSM6DS3_ACC_GYRO_XEN_XL_MASK 0x08
#define LSM6DS3_ACC_GYRO_YEN_XL_MASK 0x10
#define LSM6DS3_ACC_GYRO_ZEN_XL_MASK 0x20
#define LSM6DS3_ACC_GYRO_XEN_XL_ENABLED 0x08
#define LSM6DS3_ACC_GYRO_YEN_XL_ENABLED 0x10
#define LSM6DS3_ACC_GYRO_ZEN_XL_ENABLED 0x20
//————————————————
#define LSM6DS3_ACC_GYRO_OUTX_L_XL 0X28
#define LSM6DS3_ACC_GYRO_OUTX_H_XL 0X29
#define LSM6DS3_ACC_GYRO_OUTY_L_XL 0X2A
#define LSM6DS3_ACC_GYRO_OUTY_H_XL 0X2B
#define LSM6DS3_ACC_GYRO_OUTZ_L_XL 0X2C
#define LSM6DS3_ACC_GYRO_OUTZ_H_XL 0X2D
//————————————————
void Accel_Ini(void);
void Accel_ReadAcc(void);
//————————————————
#endif /* LSM6DS3_H_ */
Назначение макросов обсудим в процессе написания кода. Соберем проект. Ошибочный код пока закомментируем.
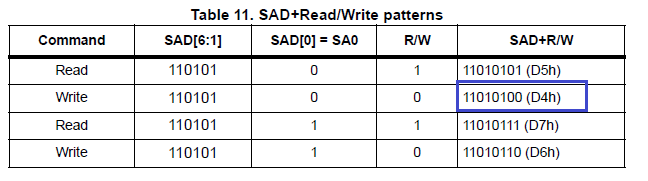
Найдем в технической документации адрес, по которому мы будем обращаться по I2C (стр. 35). В данной плате расширения разработчики ножку SA0 соединили с общим проводом для того, чтобы мы могли использовать оба датчика, и чтобы не было одинаковых адресов. Поэтому мы будем использовать 0xD4.
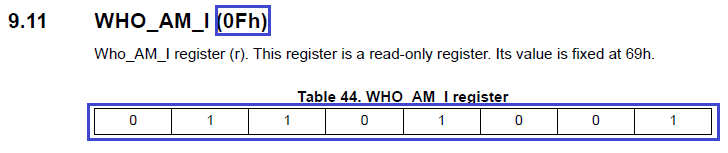
Найдем адрес регистра хранения идентификатора и сам идентификатор
Исправим код в чтении идентификатора
uint8_t ctrl = 0x00;
ctrl = Accel_IO_Read(0xD4,0x0F);
return ctrl;
Также исправим код в функции инициализации
HAL_Delay(1000);
if(Accel_ReadID()==0x69) LD2_ON;
else Error();
Подключим контроллер, соберём код и проверим, считался ли у нас идентификатор
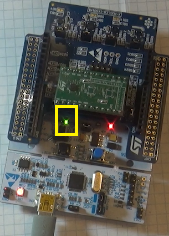
Светодиод светится зелёным цветом, значит идентификатор считан правильно.
Теперь начнем писать настройку датчика перед использованием
void AccInit(uint16_t InitStruct)
{
uint8_t value = 0;
//автоувеличение адреса регистра
value = Accel_IO_Read(0xD4,LSM6DS3_ACC_GYRO_CTRL3_C);
value&=~LSM6DS3_ACC_GYRO_IF_INC_MASK;
value|=LSM6DS3_ACC_GYRO_IF_INC_ENABLED;
Accel_IO_Write(0xD4,LSM6DS3_ACC_GYRO_CTRL3_C,value);
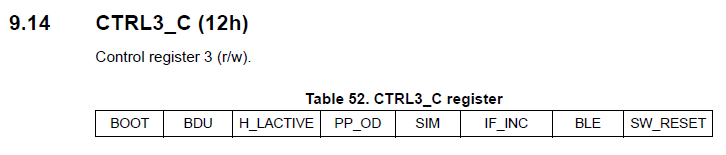
Данным кодом мы обращаемся к управляющему регистру 3 и включаем там бит автоувеличения адреса регистра

Пока на сегодня закончим с инициализацией.
В следующей части занятия мы полностью закончим нашу работу с данным датчиком.
Предыдущий урок Программирование МК STM32 Следующая часть
Техническая документация на датчик
Техническая документация на оценочную плату
Отладочную плату можно приобрести здесь Nucleo STM32F401RE
Оценочную плату можно приобрести здесь STM32 X-NUCLEO-IKS01A1
Приобрести платы с датчиком LSM6DS3 можно у следующих продавцов:
Надёжный продавец LSM6DS33 STEVAL-MKI160V1
Здесь дешевле LSM6DS33 STEVAL-MKI160V1
Здесь другая плата, намного дешевле, но от другого разработчика LSM6DS33
Смотреть ВИДЕОУРОК


Добавить комментарий